Par exemple, désigne une matrice à deux lignes et trois colonnes. On parle souvent de « matrice deux par trois », de matrice algèbre linéaire , les matrices servent d' applications linéaires . En géométrie , elles sont utilisées pour les transformations géométriques ( rotations, par exemple ) et les changements de coordonnées . En analyse numérique , de nombreux problèmes de calcul sont résolus en les ramenant à un calcul matriciel, ce qui implique souvent de manipuler des matrices de très grande dimension. Les matrices sont utilisées dans la plupart des domaines des mathématiques et des sciences, soit directement, soit indirectement par le biais de la géométrie et de l'analyse numérique.
Les matrices carrées , c'est-à-dire les matrices ayant le même nombre de lignes et de colonnes, jouent un rôle majeur en théorie des matrices. Le déterminant d'une matrice carrée est un nombre qui lui est associé et qui est fondamental pour l'étude des matrices carrées ; par exemple, une matrice carrée est inversible si et seulement si son déterminant est non nul et si sesvaleurs propres sont les racines de son polynôme caractéristique .
La théorie des matrices est la branche des mathématiques qui se concentre sur l'étude des matrices. Initialement une sous-branche de l'algèbre linéaire, elle s'est rapidement étendue à des sujets liés à la théorie des graphes , à l'algèbre , à la combinatoire et aux statistiques .
nombres (ou d'autres objets mathématiques), appelés « éléments » de la matrice. Les matrices sont munies d' opérations standard telles que l'addition et la multiplication . Le plus souvent, une matrice sur un corps est un tableau rectangulaire d' éléments de des nombres réels ou des nombres complexes . Des types d'éléments plus généraux sont abordés ci-dessous . Par exemple, voici une matrice réelle :Les nombres (ou autres objets) de la matrice sont appelés ses entrées ou ses éléments . Les lignes horizontales et verticales des entrées d'une matrice sont respectivement appelées lignes et colonnes .
Taille
La taille d'une matrice est définie par le nombre de lignes et de colonnes qu'elle contient. Le nombre de lignes et de colonnes d'une matrice (au sens usuel) est illimité, pourvu qu'il s'agisse d'entiers positifs. Une matrice à matrices lignes ou vecteurs lignes , et celles à une seule colonne sont appelées matrices colonnes ou vecteurs colonnes . Une matrice ayant le même nombre de lignes et de colonnes est appelée matrice carrée . Une matrice ayant un nombre infini de lignes ou de colonnes (ou les deux) est appelée matrice infinie . Dans certains contextes, comme les programmes de calcul formel , il est utile de considérer une matrice sans ligne ni colonne, appelée matrice vide .
| Nom | Taille | Exemple | Description |
|---|---|---|---|
| matrice de lignes | Une matrice comportant une ligne et plusieurs colonnes, parfois utilisée pour représenter un vecteur. | ||
| Matrice colonne | Une matrice à une colonne et plusieurs lignes, parfois utilisée pour représenter un vecteur | ||
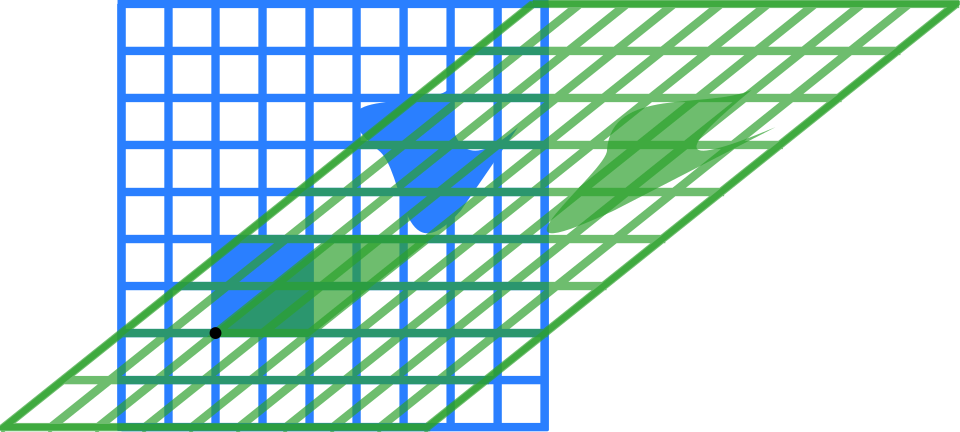
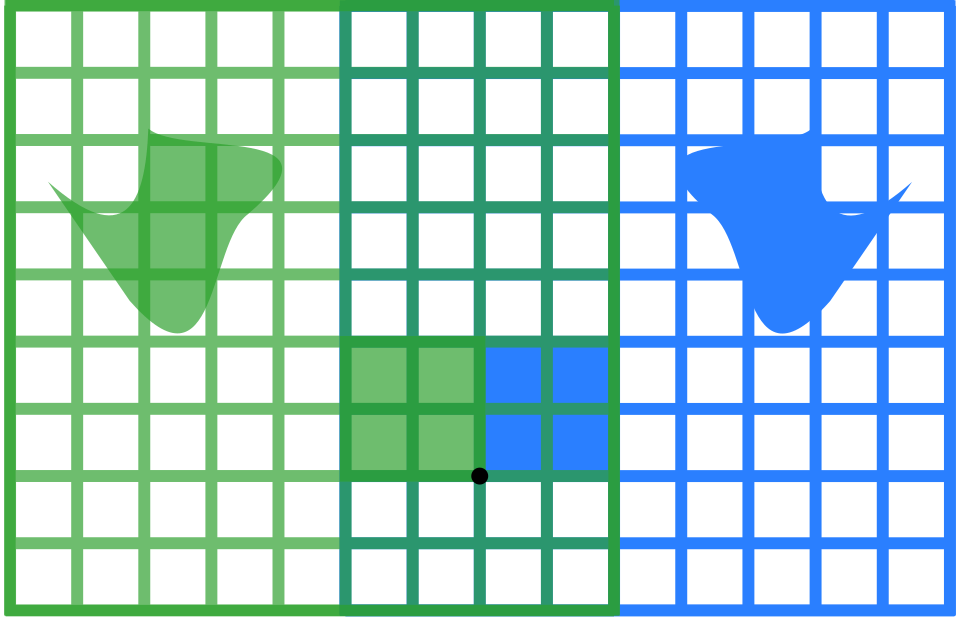
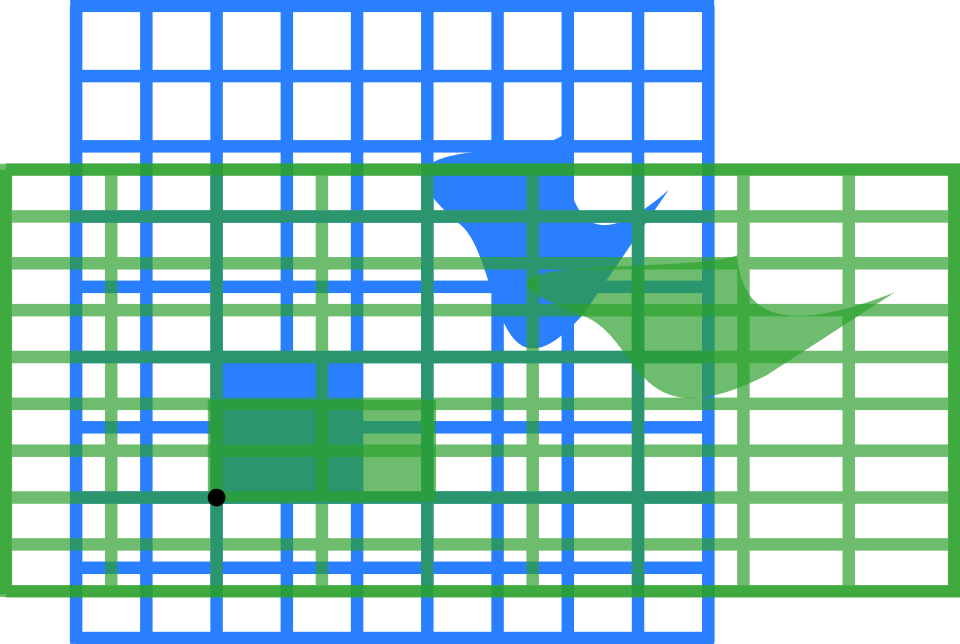
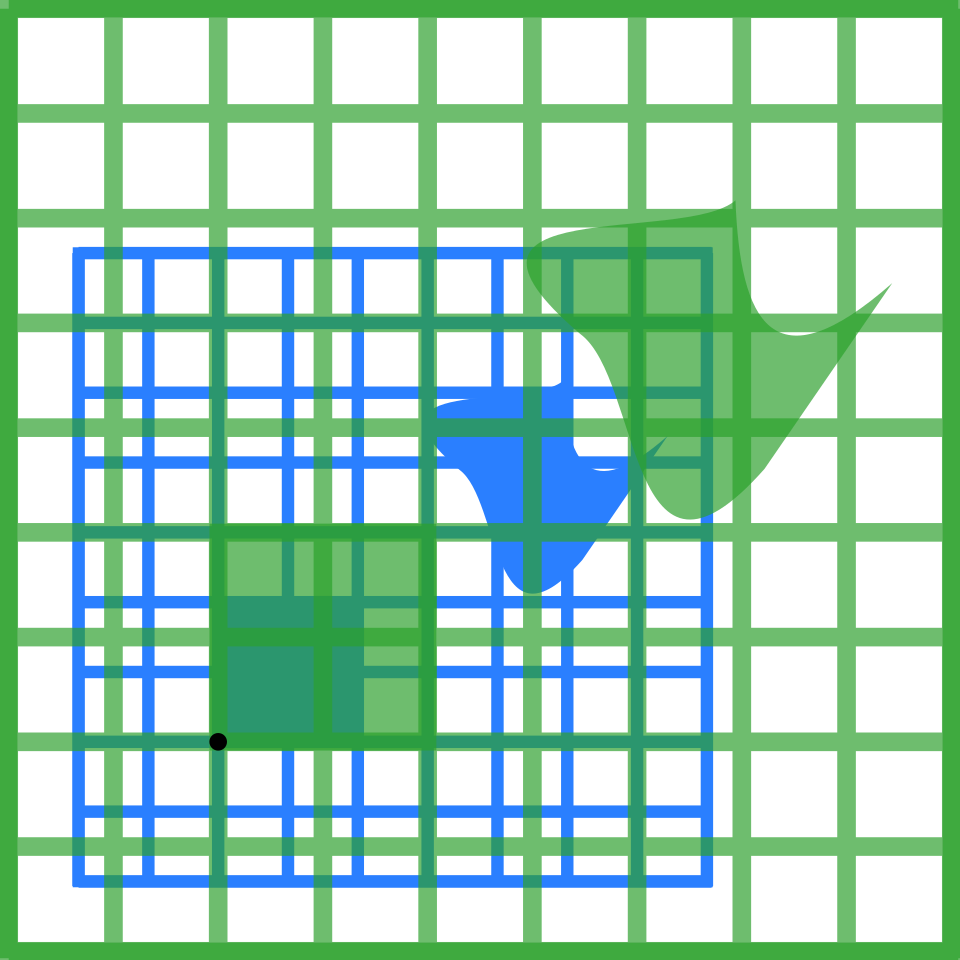
| Matrice carrée | Une matrice ayant le même nombre de lignes et de colonnes, parfois utilisée pour représenter une transformation linéaire d'un espace vectoriel sur lui-même, telle que la réflexion , la rotation ou le cisaillement . |
Notation
Les spécificités de la notation symbolique des matrices varient considérablement, avec certaines tendances dominantes. Les matrices sont généralement écrites entre crochets ou parenthèses , de sorte qu'une matrice
Les matrices sont généralement symbolisées par des lettres majuscules (comme dans les exemples ci-dessus) , tandis que les lettres minuscules correspondantes , avec deux indices (par exemple, typographie particulière , généralement le gras romain (non italique), pour mieux distinguer les matrices des autres objets mathématiques. Une autre notation consiste à souligner le nom de la variable par un double trait, avec ou sans gras, comme dans
L'élément situé à la
Parfois, les éléments d'une matrice peuvent être définis par une formule telle que Par exemple, chaque élément de la matrice suivante est déterminé par la formule
Certains langages de programmation utilisent des tableaux à double indice (ou des tableaux de tableaux) pour représenter une matrice ensemble de toutes les matrices réelles L'ensemble de toutes ou sur un anneau est noté de même carrées
Opérations de base
Several basic operations can be applied to matrices. Some, such as transposition and submatrix do not depend on the nature of the entries. Others, such as matrix addition, scalar multiplication, matrix multiplication, and row operations involve operations on matrix entries and therefore require that matrix entries are numbers or belong to a field or a ring.
In this section, it is supposed that matrix entries belong to a fixed ring, which is typically a field of numbers.
Addition
Matrix addition and subtraction require matrices of a consistent size, and are calculated entrywise. The sum
For example,
La transposée est compatible avec l'addition et la multiplication scalaire, comme l'expriment
La multiplication matricielle satisfait les règles associativité ) et distributivité à gauche et à droite ), lorsque la taille des matrices est telle que les différents produits sont définis. Le produit
En d'autres termes, la multiplication matricielle n'est pas commutative , contrairement aux nombres (rationnels, réels ou complexes), dont le produit est indépendant de l'ordre des facteurs. Un exemple de deux matrices ne commutant pas entre elles est : tandis que
Outre la multiplication matricielle ordinaire qui vient d'être décrite, il existe d'autres opérations moins fréquemment utilisées sur les matrices qui peuvent être considérées comme des formes de multiplication, telles que le produit de Hadamard et le produit de Kronecker . Elles apparaissent dans la résolution d'équations matricielles telles que l' équation de Sylvester .
Opérations sur les lignes
Sous-matrice
Une sous-matrice d'une matrice est une matrice obtenue en supprimant une série de lignes ou de colonnes, ou les deux.
Les mineurs et les cofacteurs d'une matrice sont déterminés en calculant le déterminant de certaines sous-matrices.
Une sous-matrice principale est une sous-matrice carrée obtenue en supprimant certaines lignes et colonnes. Sa définition varie selon les auteurs. D'après certains, une sous-matrice principale est une sous-matrice dont l'ensemble des indices de lignes et de colonnes restants est identique . D'autres auteurs définissent une sous-matrice principale comme une sous-matrice dont les
L'utilisation des matrices permet de résoudre ce problème de manière plus compacte qu'en écrivant toutes les équations séparément. Si indépendantes , on peut alors écrire où matrice inverse de inverse généralisée .
Transformations linéaires

Sous la correspondance biunivoque entre matrices et applications linéaires, la multiplication matricielle correspond à la composition d'applications : si une matrice , alors la composition
La dernière égalité découle de l'associativité de la multiplication matricielle mentionnée ci-dessus.
Le rang d'une matrice linéairement indépendants de cette matrice, ce qui est équivalent au nombre maximal de vecteurs colonnes linéairement indépendants. De manière équivalente, il s'agit de la dimension de l' image de l'application linéaire représentée par théorème du rang-noyau stipule que la dimension du noyau d'une matrice, augmentée de son rang , est égale au nombre de colonnes de la matrice.
Matrice carrée
Les matrices carrées d'une dimension donnée forment un anneau non commutatif , qui est l'un des exemples les plus courants d'anneau non commutatif.
Principaux types
Nom Exemple avec Matrice diagonale matrice triangulaire inférieure Matrice triangulaire supérieure
Matrice diagonale et triangulaire
Si tous les éléments de matrice triangulaire supérieure . De même, si tous les éléments de matrice diagonale .
Matrice identité
Matrice inversible et son inverse
Une matrice carrée inversible ou non singulière s'il existe une matrice matrice identité diagonale principale et matrice inverse de algorithmes permettant de tester si une matrice carrée est inversible et, le cas échéant, de calculer son inverse. L'un des plus anciens, encore couramment utilisé, est l'élimination de Gauss .
Matrice définie
| Matrice définie positive | Matrice indéfinie |
|---|---|
 Points tels que ( Ellipse ) Points tels que ( Ellipse ) | 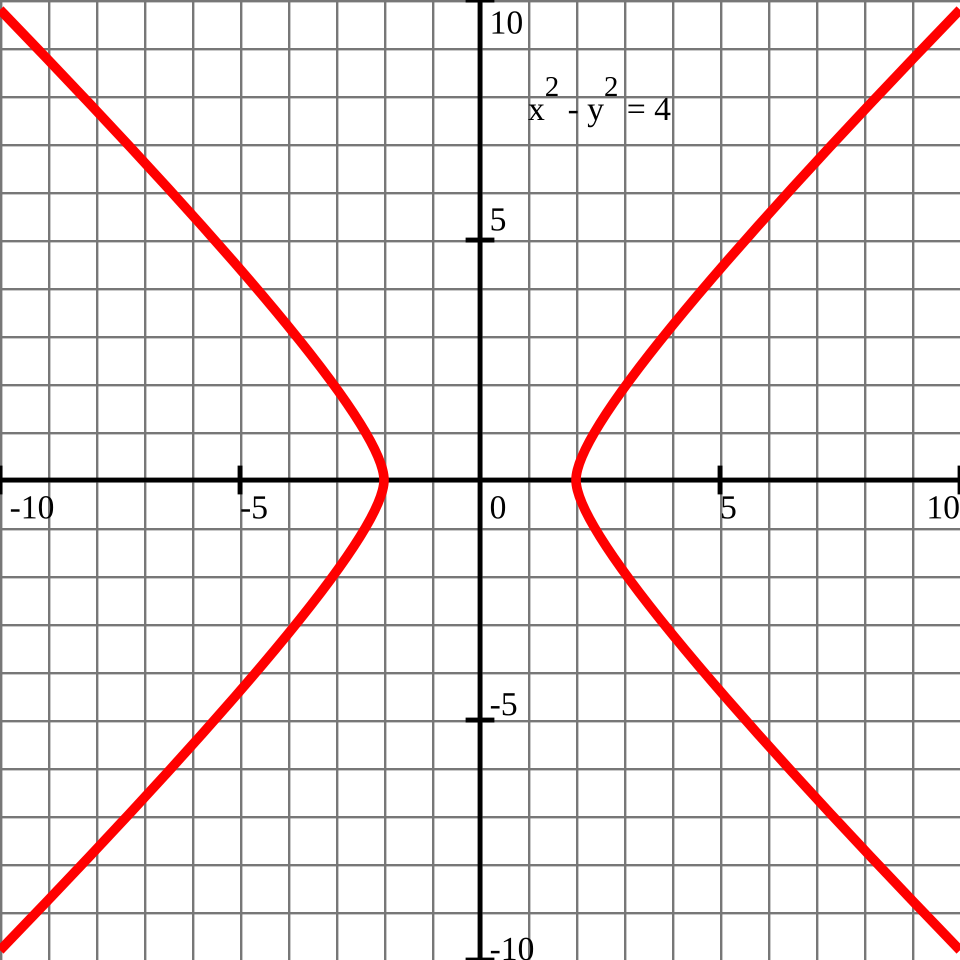 Points tels que ( Hyperbole ) Points tels que ( Hyperbole ) |
Une matrice réelle symétrique définie positive si sa forme quadratique associée prend une valeur positive pour tout vecteur non nul définie négative ; si indéfinie . Si la forme quadratique forme bilinéaire associée à
Dans le cas des matrices complexes, la même terminologie et les mêmes résultats s'appliquent, avec la matrice symétrique , la forme quadratique , la forme bilinéaire et la transposée la matrice hermitienne , la forme hermitienne , la forme sesquilinéaire et la transposée conjuguée réels dont les colonnes et les lignes sont des vecteurs unitaires orthogonaux (c’est-à-dire des vecteurs orthonormaux ). De manière équivalente, une matrice transposée est égale à son inverse : ce qui implique que I<sub>n</sub> = I<sub>n</sub> + I<sub>n</sub>, où matrice identité de cardinal inversible (son inverse est unitaire ( normale ( déterminant de toute matrice orthogonale vaut soit déterminant transformation linéaire , toute matrice orthogonale de déterminant rotation pure sans réflexion, c'est-à-dire que la transformation préserve l'orientation de la structure transformée, tandis que toute matrice orthogonale de déterminant réflexion pure et d'une rotation (éventuellement nulle). Les matrices identité ont un déterminant égal à complexe d'une matrice orthogonale est une matrice unitaire .
Opérations principales
Tracer
La trace , précédemment , la trace du produit de deux matrices est indépendante de l'ordre des facteurs : Ceci découle immédiatement de la définition de la multiplication matricielle : Il s'ensuit que la trace du produit de plus de deux matrices est indépendante des permutations cycliques des matrices ; cependant, cela ne s'applique pas en général à des permutations quelconques. Par exemple,
Déterminant
Le déterminant d'une matrice carrée si et seulement si son déterminant est non nul. Sa valeur absolue est égale à l'aire (en ou au volume (en application linéaire correspondante : le déterminant est positif si et seulement si l'orientation est conservée.
Le déterminant des matrices règle de Sarrus ). La formule de Leibniz, plus longue, généralise ces deux formules à toutes les dimensions.
Le déterminant d'un produit de matrices carrées est égal au produit de leurs déterminants : ou, en utilisant une autre notation : Ajouter un multiple d'une ligne à une autre, ou un multiple d'une colonne à une autre, ne modifie pas le déterminant. Échanger deux lignes ou deux colonnes modifie le déterminant en le multipliant par développement de Laplace exprime le déterminant en fonction des mineurs , c'est-à-dire des déterminants de matrices plus petites. Ce développement peut être utilisé pour une définition récursive des déterminants (en prenant comme cas initial le déterminant d'une matrice des systèmes linéaires à l'aide de la règle de Cramer , où le quotient des déterminants de deux matrices carrées liées est égal à la valeur de chacune des variables du système.
Valeurs propres et vecteurs propres
Aspects informatiques
Les calculs matriciels peuvent souvent être effectués à l'aide de différentes techniques. De nombreux problèmes peuvent être résolus à la fois par des algorithmes directs et par des approches itératives. Par exemple, les vecteurs propres d'une matrice carrée peuvent être obtenus en trouvant une suite de vecteurs convergeant vers un vecteur propre lorsque l'infini .
Pour choisir l’algorithme le plus approprié à chaque problème spécifique, il est important de déterminer à la fois l’efficacité et la précision de tous les algorithmes disponibles. Le domaine qui étudie ces questions est appelé algèbre linéaire numérique . Comme pour d’autres situations numériques, deux aspects principaux sont à considérer : la complexité des algorithmes et leur stabilité numérique .
Déterminer la complexité d'un algorithme revient à trouver des bornes supérieures ou des estimations du nombre d'opérations élémentaires, telles que les additions et les multiplications de scalaires, nécessaires à son exécution, par exemple la multiplication de matrices. Le calcul du produit matriciel de deux algorithme de Strassen est plus performant que cet algorithme « naïf » ; il ne requiert que Des algorithmes de multiplication matricielle théoriquement plus rapides, mais impraticables en pratique, d'algorithmes parallèles ou de systèmes de calcul distribués tels que MapReduce .
Dans de nombreuses situations pratiques, des informations supplémentaires sur les matrices impliquées sont connues. Un cas important concerne les matrices creuses , c'est-à-dire les matrices dont les coefficients sont majoritairement nuls. Il existe des algorithmes spécifiquement adaptés pour, par exemple, résoudre des systèmes linéaires méthode du gradient conjugué .
Un algorithme est, en première approximation, numériquement stable si de petites variations des valeurs d'entrée n'entraînent pas de grandes variations du résultat. Par exemple, on peut calculer l'inverse d'une matrice en calculant sa matrice adjointe : cependant, cela peut engendrer des erreurs d'arrondi importantes si le déterminant de la matrice est très petit. La norme d'une matrice permet de caractériser le conditionnement des problèmes d'algèbre linéaire, comme le calcul de l'inverse d'une matrice.
Décomposition
La décomposition spectrale ou diagonalisation exprime diagonalisable . Plus généralement, et applicable à toutes les matrices, la décomposition de Jordan transforme une matrice en forme normale de Jordan , c'est-à-dire en matrices dont les seuls éléments non nuls sont les valeurs propres exponentielle de matrice des équations différentielles linéaires , des logarithmes matriciels et des racines carrées de matrices . Pour éviter les situations de mauvais conditionnement numérique , d'autres algorithmes, tels que la décomposition de Schur, peuvent être utilisés.
Aspects et généralisations algébriques abstraits
Les matrices peuvent être généralisées de différentes manières. L'algèbre abstraite utilise des matrices dont les coefficients appartiennent à des corps plus généraux , voire à des anneaux , tandis que l'algèbre linéaire formalise les propriétés des matrices par la notion d'applications linéaires. Il est possible de considérer des matrices à une infinité de colonnes et de lignes. Une autre extension est celle des tenseurs , qui peuvent être vus comme des tableaux de nombres de dimension supérieure, contrairement aux vecteurs, souvent représentés par des suites de nombres, tandis que les matrices sont des tableaux rectangulaires ou bidimensionnels de nombres. Sous certaines conditions, les matrices tendent à former des groupes appelés groupes de matrices. De même, sous certaines conditions, les matrices forment des anneaux appelés anneaux de matrices . Bien que le produit de matrices ne soit généralement pas commutatif, certaines matrices forment des corps, parfois appelés corps de matrices. (Cependant, le terme « corps de matrices » est ambigu, car il désigne également certaines formes de corps physiques qui associent continûment des matrices à des points d’un espace donné. ) En général, les matrices sur un anneau quelconque et leur multiplication peuvent être représentées comme les flèches et la composition de flèches d’une catégorie , la catégorie des matrices sur cet anneau. Les objets de cette catégorie sont les nombres naturels, représentant les dimensions des matrices.
Matrices dont les éléments se trouvent dans un corps ou un anneau
Cet article se concentre sur les matrices dont les coefficients sont des nombres réels ou complexes. Cependant, on peut considérer des matrices avec des coefficients beaucoup plus généraux. Dans un premier temps, on peut utiliser n'importe quel corps , c'est-à-dire un ensemble où les opérations d'addition , de soustraction , de multiplication et de division sont définies et bien définies, à la place de par exemple des nombres rationnels ou les corps finis . Par exemple, la théorie du codage utilise des matrices sur des corps finis. Lorsque l'on considère les valeurs propres , celles-ci étant les racines d'un polynôme, elles n'existent que dans un corps plus grand que celui des coefficients de la matrice. Par exemple, elles peuvent être complexes dans le cas d'une matrice à coefficients réels. La possibilité de réinterpréter les coefficients d'une matrice comme des éléments d'un corps plus grand (par exemple, considérer une matrice réelle comme une matrice complexe dont tous les coefficients sont réels) permet alors de considérer que chaque matrice carrée possède un ensemble complet de valeurs propres. On peut aussi considérer uniquement les matrices dont les coefficients appartiennent à un algébriquement clos , comme le départ. polynomiaux , et plus généralement les matrices à coefficients dans un anneau anneau de matrices , isomorphe à l' anneau d'endomorphismes du module à gauche commutatif , c'est-à-dire si sa multiplication est commutative, alors l'anneau algèbre associative sur déterminant des matrices carrées sur un anneau commutatif formule de Leibniz . Une telle matrice est inversible si et seulement si son déterminant est inversible dans les superanneaux sont appelées supermatrices .
Les matrices n'ont pas toujours tous leurs coefficients dans le même anneau des matrices par blocs , que l'on peut considérer comme des matrices dont les coefficients sont eux-mêmes des matrices. Ces coefficients ne sont pas nécessairement carrés et n'appartiennent donc à aucun anneau ; cependant, pour pouvoir les multiplier, leurs dimensions doivent satisfaire certaines conditions : chaque paire de sous-matrices multipliées pour former le produit global doit avoir des dimensions compatibles.
Relation avec les cartes linéaires
Les applications linéaires sont équivalentes à des matrices précédemment . Plus généralement, toute application linéaire espaces vectoriels de dimension finie peut être décrite par une matrice les bases des matrices différentes, mais équivalentes . Nombre des notions concrètes précédentes peuvent être réinterprétées dans ce sens ; par exemple, la matrice transposée transposée de l'application linéaire définie par bases duales .
Ces propriétés peuvent être reformulées plus naturellement : la catégorie des matrices à coefficients dans un corps muni de la composition de la multiplication est équivalente à la catégorie des espaces vectoriels de dimension finie et des applications linéaires sur ce corps.
Plus généralement, l'ensemble des matrices anneau de matrices anneau d'endomorphismes de groupe est une structure mathématique constituée d'un ensemble d'objets muni d'une opération binaire , c'est-à-dire une opération qui combine deux objets quelconques en un troisième, sous certaines conditions. matrices inversibles et dont l'opération est la multiplication matricielle est appelé groupe matriciel de degré sous-groupe (c'est à - dire un sous-groupe inclus dans) du groupe des matrices linéaire général de degré
Toute propriété des matrices carrées conservée par produit matriciel et par inversion peut servir à définir un groupe de matrices. Par exemple, l'ensemble des matrices dont le déterminant est égal à 1 forme le groupe linéaire spécial de degré . 131 ensemble des par la condition , groupe orthogonal . Toute matrice orthogonale a un déterminant égal groupe fini est isomorphe à un groupe de matrices, comme on peut le constater en considérant la représentation régulière du groupe symétrique . Les groupes généraux peuvent être étudiés à l'aide de groupes de matrices, qui sont relativement bien compris grâce à la théorie des représentations .
Matrices infinies
Il est également possible de considérer des matrices à une infinité de lignes et de colonnes. Les opérations de base introduites précédemment sont définies de la même manière dans ce cas. Cependant, la multiplication matricielle, et toutes les opérations qui en découlent, n'ont de sens que lorsqu'elle est restreinte à certaines matrices, car la somme figurant dans la définition du produit matriciel contiendra une infinité de termes. Une solution simple à ce problème consiste à se restreindre aux matrices finitaires dont toutes les lignes (ou colonnes) contiennent un nombre fini de termes non nuls. Comme dans le cas fini (voir ci-dessus ), où les matrices décrivent des applications linéaires, les matrices infinies peuvent être utilisées pour décrire des opérateurs sur des espaces de Hilbert , ce qui soulève des questions de convergence et de continuité . Toutefois, le point de vue explicite des matrices tend à obscurcir le sujet, et l'on utilise plutôt les outils abstraits et plus puissants de l'analyse fonctionnelle , en reliant les matrices à des applications linéaires (comme dans le cas fini ci-dessus ), mais en imposant des contraintes supplémentaires de convergence et de continuité.
Matrice vide
Une matrice vide est une matrice dont le nombre de lignes ou de colonnes (ou les deux) est nul. Les matrices vides peuvent servir de cas de base pour certaines constructions récursives , et permettent de manipuler les applications impliquant l' espace vectoriel nul . Par exemple, si matrice nulle des systèmes de calcul formel permettent de les créer et de les manipuler. Le déterminant de la matrice produit vide apparaissant dans la formule de Leibniz pour le déterminant. Cette valeur est également nécessaire pour assurer la cohérence avec le cas de l' identité de Desnanot–Jacobi reliant les déterminants aux déterminants de matrices plus petites.
Matrices dont les coefficients sont dans un semi-anneau
Un semi-anneau est semblable à un anneau, mais ses éléments n'ont pas nécessairement d'inverse additif ; par conséquent, la soustraction y est restreinte. La définition de l'addition et de la multiplication des matrices à coefficients dans un anneau s'applique sans modification aux matrices à coefficients dans un semi-anneau. Les matrices de taille fixe à coefficients dans un semi-anneau forment un monoïde commutatif pour l'addition. Les matrices carrées de taille fixe à coefficients dans un semi-anneau forment un semi-anneau pour l'addition et la multiplication.
Le déterminant d'une matrice carrée semi-anneau commutatif ne peut être défini de manière générale, car sa définition impliquerait l'addition des inverses des éléments du semi-anneau. On utilise plutôt la paire déterminant-déterminant positif et déterminant-déterminant négatif.
où les sommes sont prises respectivement sur les permutations paires et impaires.
Matrices avec des entrées dans une catégorie
Les matrices et leur multiplication peuvent être définies à partir d'éléments d'une catégorie munie d'un « produit tensoriel » analogue à la multiplication dans un anneau, et dont les coproduits sont analogues à l'addition dans un anneau, le premier étant distributif sur le second. Cependant, la multiplication ainsi définie peut n'être associative que dans un sens plus faible que d'usage. Ces éléments font partie d'une structure plus vaste appelée la bicatégorie des matrices . Une description complète du résumé ci-dessus est fournie ci-après pour les lecteurs intéressés.
Soit une catégorie monoïdale satisfaisant les deux conditions suivantes :
- Tous les coproduits (petits) existent ; en particulier, soit un objet initial .
- Le foncteur est distributif sur les coproduits ; c’est-à-dire que pour tout objet et toute famille d’objets dans , les -morphismes canoniques sont des isomorphismes . En particulier, les morphismes canoniques et sont des isomorphismes.
Alors, la bicatégorie des matrices - est la suivante :
- Les objets sont les ensembles.
- Un 1-morphisme est une application ; il s'agit simplement d'une matrice sur .
- La composition des 1-morphismes et , qui peut être interprétée comme une multiplication matricielle, est
- Le 1-morphisme identité sur est
- Un 2-morphisme entre 1-morphismes est une famille de β-morphismes . La définition de la composition verticale et horizontale des 2-morphismes est naturelle : la composition verticale est la composition composante par composante des β-morphismes ; la composition horizontale découle de la fonctorialité et de la propriété universelle des coproduits.
En général, la bicatégorie des matrices n'est pas nécessairement une 2-catégorie stricte . Par exemple, la composition des 1-morphismes peut ne pas être associative au sens strict usuel, mais seulement à isomorphisme cohérent près .
Applications
Les matrices ont de nombreuses applications, tant en mathématiques que dans d'autres sciences. Certaines exploitent simplement la représentation compacte d'un ensemble de nombres dans une matrice. Par exemple, l'exploration de textes et la compilation automatique de thésaurus utilisent des matrices document-terme telles que TF-IDF pour suivre la fréquence de certains mots dans plusieurs documents.
Les nombres complexes peuvent être représentés par des matrices réelles 2×2 particulières, grâce auxquelles l'addition et la multiplication de nombres complexes et de matrices sont équivalentes. Par exemple, les matrices de rotation 2×2 représentent la multiplication par un nombre complexe de valeur absolue 1, comme indiqué précédemment . Une interprétation similaire est possible pour les quaternions et les algèbres de Clifford en général .
En théorie des jeux et en économie , la matrice des gains représente le gain de deux joueurs en fonction des stratégies choisies parmi un ensemble fini donné. L'espérance du jeu, lorsque les deux joueurs adoptent des stratégies mixtes , s'obtient en multipliant cette matrice par des vecteurs représentant les stratégies. Le théorème du minimax, fondamental en théorie des jeux, est étroitement lié à la théorie de la dualité des programmes linéaires , souvent formulés sous forme de produits matrice-vecteur.
Les premières techniques de chiffrement, comme le chiffrement de Hill, utilisaient également des matrices. Cependant, en raison de la linéarité des matrices, ces codes sont relativement faciles à casser. L'infographie utilise des matrices pour représenter des objets ; pour calculer leurs transformations à l'aide de matrices de rotation affine afin de réaliser des tâches telles que la projection d'un objet tridimensionnel sur un écran bidimensionnel, correspondant à une observation théorique par caméra ; et pour appliquer des convolutions d'image telles que l'accentuation, le flou, la détection de contours, etc. Les matrices sur un anneau de polynômes sont importantes dans l'étude de la théorie du contrôle .
La chimie utilise les matrices de diverses manières, notamment depuis l'utilisation de la théorie quantique pour étudier la liaison moléculaire et la spectroscopie . On peut citer comme exemples la matrice de recouvrement et la matrice de Fock utilisées pour résoudre les équations de Roothaan afin d'obtenir les orbitales moléculaires de la méthode Hartree-Fock .
Théorie des graphes
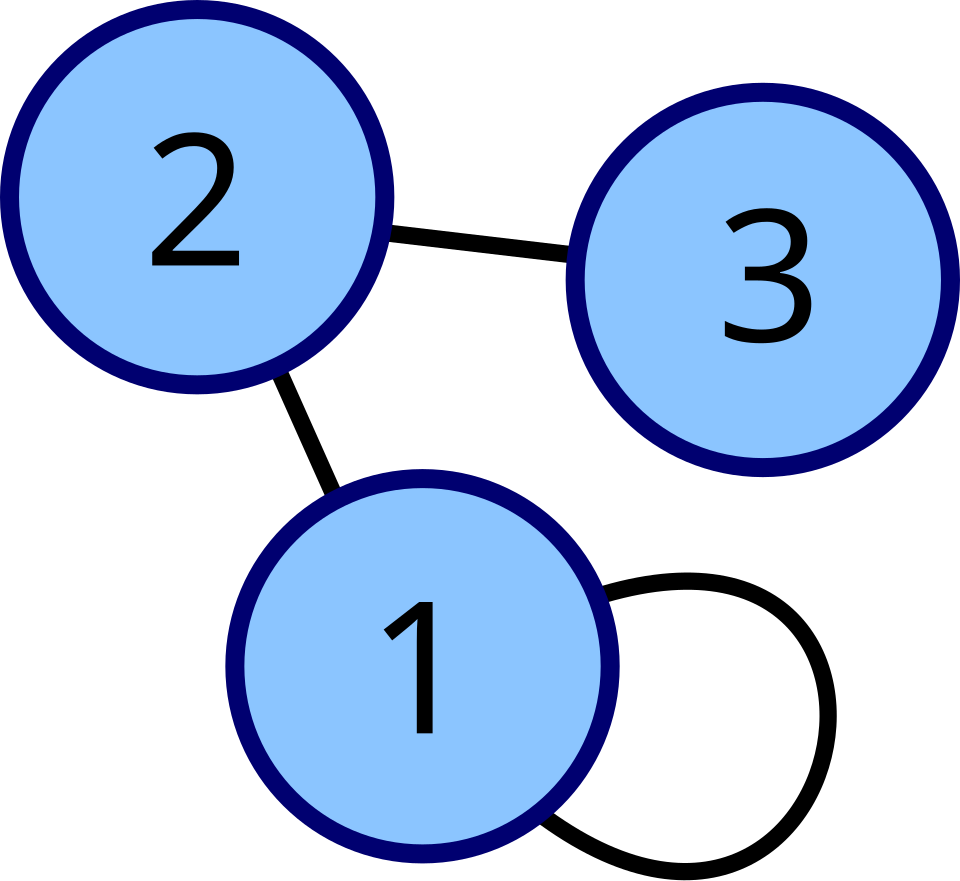
La matrice d'adjacence d'un graphe fini est une notion fondamentale de la théorie des graphes . Elle indique quels sommets du graphe sont reliés par une arête. Les matrices ne contenant que deux valeurs différentes ( matrices logiques . La matrice de distance (ou de coût) contient des informations sur les distances entre les arêtes . Ces concepts peuvent être appliqués aux sites web reliés par des hyperliens [ etc. Dans ce cas (sauf si le réseau de connexion est extrêmement dense), les matrices tendent à être creuses , c'est-à-dire à contenir peu d'éléments non nuls. Par conséquent, des algorithmes matriciels spécifiquement adaptés peuvent être utilisés en théorie des réseaux .
Analyse et géométrie
La matrice hessienne d'une fonction différentiable est constituée des dérivées secondes de
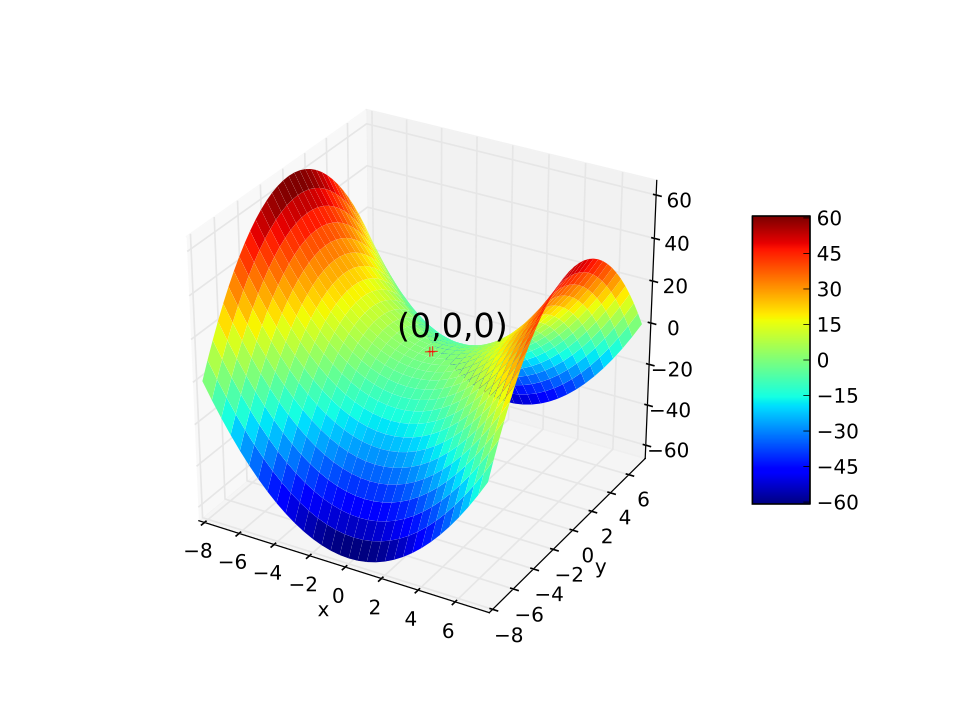
Elle encode des informations sur le comportement de croissance locale de la fonction : étant donné un point critique f s’annulent minimum local si la matrice hessienne est définie positive . La programmation quadratique peut être utilisée pour trouver les minima ou maxima globaux de fonctions quadratiques étroitement liés à ceux associés aux matrices (voir ci-dessus ).
Une autre matrice fréquemment utilisée en géométrie est la matrice jacobienne d'une application différentiable f₁ théorème des fonctions implicites . ''m''"}},"i":0}}]
Les équations aux dérivées partielles peuvent être classées en considérant la matrice des coefficients des opérateurs différentiels d'ordre le plus élevé de l'équation. Pour les équations aux dérivées partielles elliptiques, cette matrice est définie positive, ce qui a une influence déterminante sur l'ensemble des solutions possibles de l'équation en question.
La méthode des éléments finis est une méthode numérique importante pour résoudre les équations aux dérivées partielles, largement utilisée dans la simulation de systèmes physiques complexes. Elle vise à approcher la solution d'une équation par des fonctions linéaires par morceaux, ces morceaux étant choisis sur une grille suffisamment fine, ce qui permet de la reformuler sous forme d'équation matricielle.
Les matrices stochastiques sont des matrices carrées dont les lignes sont des vecteurs de probabilité , c'est-à-dire dont les coefficients sont non négatifs et dont la somme est égale à un. Elles servent à définir des chaînes de Markov à nombre fini d'états. Une ligne de la matrice stochastique donne la distribution de probabilité de la prochaine position d'une particule se trouvant actuellement dans l'état correspondant à cette ligne. Les propriétés de la chaîne de Markov, telles que les états absorbants (c'est-à-dire les états que toute particule atteint finalement), peuvent être déduites des vecteurs propres des matrices de transition.
Les statistiques utilisent également les matrices sous de nombreuses formes. Les statistiques descriptives visent à décrire des ensembles de données, souvent représentables par des matrices de données , qui peuvent ensuite être soumises à des techniques de réduction de dimensionnalité . La matrice de covariance variance mutuelle de plusieurs variables aléatoires . Une autre technique utilisant des matrices est la méthode carrés linéaires , qui approxime un ensemble fini de paires valeurs singulières
Les matrices aléatoires sont des matrices dont les éléments sont des nombres aléatoires, suivant des lois de probabilité appropriées , telles que la loi normale matricielle . Au-delà de la théorie des probabilités, elles trouvent des applications dans des domaines allant de la théorie des nombres à la physique .
Mécanique quantique et physique des particules
Le premier modèle de mécanique quantique ( Heisenberg , 1925) utilisait des matrices de dimension infinie pour définir les opérateurs qui remplaçaient les variables de la physique classique telles que la position, l'impulsion et l'énergie. (On parle parfois de mécanique matricielle . ) Depuis, les matrices, de dimension finie et infinie, sont employées à de nombreuses fins en mécanique quantique. On peut citer en exemple la matrice densité , un outil utilisé pour calculer les probabilités des résultats de mesures effectuées sur des systèmes physiques .
Les transformations linéaires et les symétries associées jouent un rôle fondamental en physique moderne . Par exemple, les particules élémentaires de la théorie quantique des champs sont classées comme des représentations du groupe de Lorentz de la relativité restreinte et, plus précisément, selon leur comportement sous l'effet du groupe de spin . Des représentations concrètes, faisant intervenir les matrices de Pauli et, plus généralement, les matrices gamma, sont essentielles à la description physique des fermions , qui se comportent comme des spineurs . Pour les trois quarks les plus légers , il existe une représentation de type groupe impliquant le groupe unitaire spécial SU(3) ; pour leurs calculs, les physiciens utilisent une représentation matricielle pratique, les matrices de Gell-Mann , également utilisées pour le groupe de jauge SU(3) qui constitue la base de la description moderne des interactions nucléaires fortes, la chromodynamique quantique . La matrice de Cabibbo–Kobayashi–Maskawa exprime à son tour le fait que les états de quarks de base qui sont importants pour les interactions faibles ne sont pas les mêmes que les états de quarks de base qui définissent des particules avec des masses spécifiques et distinctes, mais sont liés linéairement à ces derniers .
Une autre matrice constitue un outil essentiel pour décrire les expériences de diffusion qui forment la pierre angulaire de la physique expérimentale des particules : les réactions de collision, telles que celles qui se produisent dans les accélérateurs de particules , où des particules non interagissantes se dirigent les unes vers les autres et entrent en collision dans une petite zone d’interaction, produisant ainsi un nouvel ensemble de particules non interagissantes, peuvent être décrites comme le produit scalaire des états des particules sortantes et d’une combinaison linéaire des états des particules entrantes. Cette combinaison linéaire est donnée par une matrice appelée matrice S , qui encode toutes les informations relatives aux interactions possibles entre les particules.
Modes normaux
Une application générale des matrices en physique est la description des systèmes harmoniques couplés linéairement. Les équations du mouvement de tels systèmes peuvent être décrites sous forme matricielle : une matrice de masse multiplie une vitesse généralisée pour donner le terme cinétique, et une matrice de force multiplie un vecteur déplacement pour caractériser les interactions. La meilleure façon d'obtenir des solutions est de déterminer les vecteurs propres du système , ses modes normaux , par diagonalisation de l'équation matricielle. De telles techniques sont cruciales pour l'étude de la dynamique interne des molécules : les vibrations internes des systèmes constitués d'atomes liés entre eux . Elles sont également nécessaires pour décrire les vibrations mécaniques et les oscillations dans les circuits électriques
Optique géométrique
L'optique géométrique offre d'autres applications matricielles. Dans cette théorie approximative, la nature ondulatoire de la lumière est négligée. Il en résulte un modèle où les rayons lumineux sont effectivement des rayons géométriques . Si la déviation des rayons lumineux par les éléments optiques est faible, l'action d'une lentille ou d'un élément réfléchissant sur un rayon donné peut être exprimée comme le produit d'un vecteur à deux composantes par une matrice 2×2 appelée matrice de transfert de rayons : les composantes du vecteur sont la pente du rayon et sa distance à l'axe optique, tandis que la matrice encode les propriétés de l'élément optique. Il existe deux types de matrices : une matrice de réfraction décrivant la réfraction à la surface d'une lentille, et une matrice de translation décrivant la translation du plan de référence vers la surface réfractante suivante, où une autre matrice de réfraction s'applique. Le système optique, constitué d'une combinaison de lentilles et d'éléments réfléchissants, est simplement décrit par la matrice résultant du produit des matrices des composants.
Le calcul de Jones modélise la polarisation d'une source lumineuse comme un vecteur, et les effets des filtres optiques sur ce vecteur de polarisation comme une matrice.
Électronique
Les circuits électroniques composés de composants linéaires (tels que des résistances, des inductances et des condensateurs) obéissent aux lois de Kirchhoff , ce qui conduit à un système d'équations linéaires, qui peut être décrit par une équation matricielle reliant les courants et tensions de la source aux courants et tensions résultants en chaque point du circuit, et où les éléments de la matrice sont déterminés par le circuit.
Histoire
Les matrices sont utilisées depuis longtemps pour résoudre les équations linéaires , mais elles étaient connues sous le nom de tableaux jusqu'au XIXe siècle. Le texte chinois « Les Neuf Chapitres sur l'art mathématique », écrit entre le Xe et le IIe siècle avant notre ère, est le premier exemple d'utilisation de méthodes matricielles pour résoudre des systèmes d'équations . En 1545, le mathématicien italien Gerolamo Cardano introduisit cette méthode en Europe avec la publication de son ouvrage « Ars Magna » . Le mathématicien japonais Seki utilisa les mêmes méthodes matricielles pour résoudre des systèmes d'équations en 1683 Le mathématicien néerlandais Jan de Witt représenta les transformations à l'aide de tableaux dans son livre « Éléments de courbes » (1659) . Entre 1700 et 1710, Gottfried Wilhelm Leibniz popularisa l'utilisation des tableaux pour enregistrer des informations ou des solutions et expérimenta plus de 50 systèmes de tableaux différents. Cramer a présenté sa règle en 1750.
L’emploi du terme « matrice » en mathématiques (mot anglais signifiant « utérus » au XIXe siècle, issu du latin, et également terme technique en imprimerie , en biologie et en géologie ) a été forgé par James Joseph Sylvester en 1850 , qui concevait une matrice comme un objet donnant lieu à plusieurs déterminants, aujourd’hui appelés mineurs , c’est-à-dire les déterminants de matrices plus petites obtenues à partir de la matrice originale par suppression de colonnes et de lignes. Dans un article de 1851, Sylvester explique :
J'ai défini dans des articles précédents une « matrice » comme un tableau rectangulaire de termes, à partir duquel différents systèmes de déterminants peuvent être engendrés par un parent commun.
Arthur Cayley publia un traité sur les transformations géométriques utilisant des matrices qui n'étaient pas des versions pivotées des coefficients étudiés, comme cela avait été fait auparavant. Il définissait plutôt des opérations telles que l'addition, la soustraction, la multiplication et la division comme des transformations de ces matrices et démontrait leurs propriétés d'associativité et de distributivité. Cayley étudia et démontra la non-commutativité de la multiplication matricielle ainsi que la commutativité de l'addition matricielle. La théorie matricielle primitive limitait l'utilisation des tableaux presque exclusivement aux déterminants, et les opérations matricielles abstraites de Cayley furent révolutionnaires. Il joua un rôle déterminant dans la proposition d'un concept de matrice indépendant des systèmes d'équations. En 1858, Cayley publia ses « Mémoires sur la théorie des matrices » dans lesquels il proposa et démontra le théorème de Cayley-Hamilton .
Le mathématicien anglais Cuthbert Edmund Cullis fut le premier à utiliser la notation moderne entre crochets pour les matrices en 1913 et il démontra simultanément la première utilisation significative de la notation de théorie des nombres ont conduit Gauss à relier les coefficients des formes quadratiques , c'est-à-dire des expressions telles que applications linéaires en trois dimensions aux matrices. Eisenstein a approfondi ces notions, notamment en remarquant que, dans le langage moderne, les produits matriciels ne sont pas commutatifs . Cauchy a été le polynôme où désigne le produit des termes indiqués. Il a également montré, en 1829, que les des Jacobi a étudié les « déterminants fonctionnels » — appelés plus tard déterminants de Jacobi par Sylvester — qui permettent de décrire les transformations géométriques à un niveau local (ou infinitésimal ), voir ci-dessus . Les Vorlesungen über die Theorie der Determinanten de Kronecker et Zur Determinantentheorie de Weierstrass , tous deux publiés en 1903, ont été les premiers à traiter les déterminants de manière axiomatique , contrairement aux approches plus concrètes antérieures telles que la formule de Cauchy mentionnée. À ce moment-là, la notion de déterminant était solidement établie.
De nombreux théorèmes ont d'abord été établis uniquement pour les petites matrices ; par exemple, le théorème de Cayley-Hamilton a été démontré pour les matrices Hamilton pour les matrices Frobenius , travaillant sur les formes bilinéaires , a généralisé le théorème à toutes les dimensions (1898). Également à la fin du XIXe siècle, l' élimination de Gauss-Jordan (généralisant un cas particulier aujourd'hui connu sous le nom d'élimination de Gauss ) a été établie par Wilhelm Jordan . Au début du XXe siècle, les matrices ont acquis un rôle central en algèbre linéaire notamment grâce à leur utilisation dans la classification des systèmes de nombres hypercomplexes du siècle précédent
L'introduction de la mécanique matricielle par Heisenberg , Born et Jordan a conduit à l'étude des matrices à une infinité de lignes et de colonnes. Plus tard, von Neumann a formulé mathématiquement la mécanique quantique en développant des notions d'analyse fonctionnelle telles que les opérateurs linéaires sur les espaces de Hilbert , qui, en première approximation, correspondent à l'espace euclidien , mais avec une infinité de directions indépendantes .
Autres usages historiques du mot « matrice » en mathématiques
Ce mot a été utilisé de manière inhabituelle par au moins deux auteurs d'importance historique.
Bertrand Russell et Alfred North Whitehead, dans leurs Principia Mathematica (1910–1913), utilisent le mot « matrice » dans le contexte de leur axiome de réductibilité . Ils ont proposé cet axiome comme moyen de réduire toute fonction à une fonction de type inférieur, successivement, de sorte qu’au « bas » (ordre 0), la fonction est identique à son extension :
variable apparente . Alors, toute fonction possible autre qu'une matrice se dérive d'une matrice par généralisation, c'est-à-dire en considérant la proposition selon laquelle la fonction en question est vraie pour toutes les valeurs possibles ou pour une certaine valeur de l'un des arguments, le ou les autres arguments restant indéterminés.Par exemple, une fonction
Alfred Tarski, dans son Introduction à la logique de 1941, a utilisé le mot « matrice » comme synonyme de la notion de table de vérité telle qu'elle est utilisée en logique mathématique.