Les espaces vectoriels généralisent les vecteurs euclidiens , permettant la modélisation de grandeurs physiques (telles que les forces et la vitesse ) qui possèdent non seulement une magnitude , mais aussi une direction . Le concept d'espace vectoriel est fondamental en algèbre linéaire , de même que celui de matrice , qui permet d'effectuer des calculs dans les espaces vectoriels. Ceci offre une méthode concise et synthétique pour manipuler et étudier les systèmes d'équations linéaires .
Les espaces vectoriels sont caractérisés par leur dimension , qui, en résumé, spécifie le nombre de directions indépendantes dans l'espace. Cela signifie que pour deux espaces vectoriels définis sur un corps donné et de même dimension, les propriétés qui ne dépendent que de la structure vectorielle sont exactement les mêmes (c'est-à-dire que les espaces vectoriels sont isomorphes ). Un espace vectoriel est de dimension finie si sa dimension est un entier naturel . Sinon, il est de dimension infinie , et sa dimension est un cardinal infini . Les espaces vectoriels de dimension finie apparaissent naturellement en géométrie et dans les domaines connexes. Les espaces vectoriels de dimension infinie apparaissent dans de nombreux domaines des mathématiques. Par exemple, les anneaux de polynômes sont des espaces vectoriels de dimension infinie dénombrable , et de nombreux espaces de fonctions ont pour dimension le cardinal du continu .
De nombreux espaces vectoriels considérés en mathématiques sont également munis d'autres structures . C'est le cas des algèbres , qui comprennent les extensions de corps , les anneaux de polynômes, les algèbres associatives et les algèbres de Lie . C'est également le cas des espaces vectoriels topologiques , qui comprennent les espaces de fonctions, les espaces préhilbertiens , les espaces normés , les espaces de Hilbert et les espaces de Banach .
corps ensemble non vide opération binaire et d'une fonction binaire qui satisfont les huit axiomes énumérés ci-dessous. Dans ce contexte, les éléments de multiplication scalaire , associe à tout scalaireLes conséquences directes des axiomes incluent que, pour tout et , on a
- implique ou
Plus concisément encore, un espace vectoriel est un module sur un corps .
Bases, coordonnées vectorielles et sous-espaces

Les bases sont un outil fondamental pour l'étude des espaces vectoriels, notamment en dimension finie. En dimension infinie, l'existence de bases infinies, souvent appelées bases de Hamel , repose sur l' axiome du choix . Il s'ensuit qu'en général, aucune base ne peut être décrite explicitement. Par exemple, l' ensemble des nombres réels forme un espace vectoriel de dimension infinie sur l'ensemble des nombres rationnels , pour lequel aucune base spécifique n'est connue.
Considérons une base d'un espace vectoriel uplet des coordonnées est le vecteur des coordonnées de l' correspondance biunivoque entre les vecteurs et leurs vecteurs de coordonnées établit une correspondance entre l'addition vectorielle et la multiplication par un scalaire. Il s'agit donc d'un isomorphisme d'espaces vectoriels , qui permet de traduire les raisonnements et les calculs sur les vecteurs en raisonnements et calculs sur leurs coordonnées.
Histoire
Les espaces vectoriels découlent de la géométrie affine , par l'introduction de coordonnées dans le plan ou l'espace tridimensionnel. Vers 1636, les mathématiciens français René Descartes et Pierre de Fermat fondèrent la géométrie analytique en identifiant les solutions d'une équation à deux inconnues à des points d'une courbe plane . Pour obtenir des solutions géométriques sans utiliser de coordonnées, Bolzano introduisit, en 1804, certaines opérations sur les points, les droites et les plans, précurseurs des vecteurs. coordonnées barycentriques . relation d'équivalence sur les segments de droite orientés de même longueur et de même direction, qu'il nomma équipollence . Un vecteur euclidien est alors une classe d'équivalence de cette relation.
Les vecteurs ont été reconsidérés avec la présentation des nombres complexes par Argand et Hamilton et l'introduction des quaternions par ce dernier. Ce sont des éléments de R 2 et R 4 ; leur traitement à l'aide de combinaisons linéaires remonte à Laguerre en 1867, qui a également défini des systèmes d'équations linéaires .
En 1857, Cayley introduisit la notation matricielle , permettant l'harmonisation et la simplification des applications linéaires . À peu près à la même époque, Grassmann étudia le calcul barycentrique initié par Möbius. Il envisagea des ensembles d'objets abstraits munis d'opérations. Ses travaux présentent les concepts d' indépendance linéaire et de dimension , ainsi que le produit scalaire . Les travaux de Grassmann de 1844 dépassent également le cadre des espaces vectoriels, puisque son étude de la multiplication le conduisit à ce que l'on appelle aujourd'hui les algèbres . Le mathématicien italien Peano fut le premier à donner la définition moderne des espaces vectoriels et des applications linéaires en 1888, bien qu'il les ait nommés « systèmes linéaires ». L'axiomatisation de Peano autorisait les espaces vectoriels de dimension infinie, mais Peano n'a pas approfondi cette théorie. En 1897, Salvatore Pincherle adopta les axiomes de Peano et fit ses premiers pas dans la théorie des espaces vectoriels de dimension infinie.
Un développement important des espaces vectoriels est dû à la construction des espaces de fonctions par Henri Lebesgue . Ce travail a ensuite été formalisé par Banach et Hilbert , vers 1920. À cette époque, l'algèbre et le nouveau domaine de l'analyse fonctionnelle ont commencé à interagir, notamment avec des concepts clés tels que les espaces de fonctions p -intégrables et les espaces de Hilbert .
Exemples
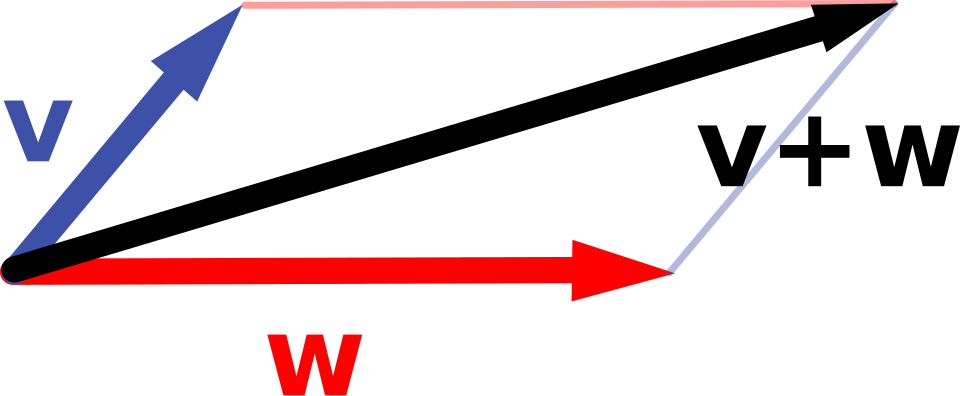
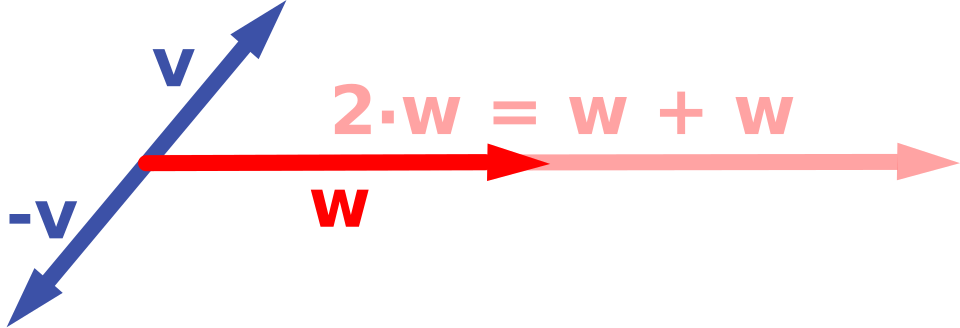
Le premier exemple d'espace vectoriel est constitué de flèches dans un plan fixe , partant d'un point fixe. En physique, on utilise cet espace pour décrire les forces ou les vitesses . Étant donné deux flèches quelconques parallélogramme qu'elles engendrent contient une flèche diagonale partant également de l'origine. Cette nouvelle flèche est appelée la somme des deux flèches et est notée nombre réel positif paire ordonnée . Une telle paire est notée
Le premier exemple ci-dessus se réduit à cet exemple si une flèche est représentée par une paire de coordonnées cartésiennes de son extrémité.
Espace de coordonnées
L'exemple le plus simple d'espace vectoriel sur un corps nombres complexes des nombres réels unité imaginaire , forme un espace vectoriel sur les réels muni des opérations d'addition et de multiplication usuelles : plan complexe les extensions de corps fournissent une autre classe d'exemples d'espaces vectoriels, notamment en algèbre et en théorie algébrique des nombres : un corps Les fonctions d'un ensemble droite réelle , un intervalle ou d'autres sous-ensembles de la continuité , l'intégrabilité ou la dérivabilité, sont bien définies par rapport à la linéarité : les sommes et les multiples par un scalaire de fonctions possédant une telle propriété la conservent. Par conséquent, l'ensemble de ces fonctions forme des espaces vectoriels, dont l'étude relève de l'analyse fonctionnelle .
Équations linéaires
où est la matrice contenant les coefficients des équations données, est le vecteur , désigne le produit matriciel et est le vecteur nul. De même, les solutions des équations différentielles linéaires homogènes forment des espaces vectoriels. Par exemple,
donne où et sont des constantes arbitraires, et est la fonction exponentielle naturelle .
Applications linéaires et matrices
Un isomorphisme est une application linéaire application inverse compositions possibles identités . Autrement dit, et surjective . [ existe un isomorphisme entre Les matrices sont une notion utile pour encoder les applications linéaires. Elles sont écrites sous la forme d'un tableau rectangulaire de scalaires, comme dans l'image de droite. Toute matrice la sommation , soit en utilisant la multiplication matricielle de la matrice par le vecteur de coordonnées : De plus, après avoir choisi les bases de
Valeurs propres et vecteurs propres
Un sous-ensemble non vide d'un espace vectoriel, stable par addition et multiplication par un scalaire (et contenant donc le vecteur de ), est appelé sous-espace vectoriel de , ou simplement sous-espace de , lorsque l'espace ambiant est sans ambiguïté un espace vectoriel. Les sous-espaces de sont des espaces vectoriels (sur le même corps) à part entière. L'intersection de tous les sous-espaces contenant un ensemble donné de vecteurs est appelée son espace engendré , et c'est le plus petit sous-espace de contenant l'ensemble . Exprimé en termes d'éléments, l'espace engendré est le sous-espace constitué de toutes les combinaisons linéaires des éléments de .
L'équivalent des sous-espaces est l'espace vectoriel quotient . Étant donné un sous-espace quelconque , l'espace quotient (« modulo ») est défini comme suit : en tant qu'ensemble, il est constitué de , où est un vecteur quelconque de . La somme de deux tels éléments et est , et la multiplication par un scalaire est donnée par . Le point clé de cette définition est que si et seulement si la différence de et appartient à . De cette façon, l'espace quotient « oublie » les informations contenues dans le sous-espace .
Le noyau d'une application linéaire est constitué de vecteurs qui sont envoyés sur . [ noyau et l' image sont des sous-espaces de et , respectivement.
Un exemple important est le noyau d'une application linéaire pour une matrice fixée . Le noyau de cette application est le sous-espace des vecteurs tels que , qui est précisément l'ensemble des solutions du système d'équations linéaires homogènes appartenant à . Ce concept s'étend également aux équations différentielles linéaires dont les coefficients sont aussi des fonctions de . Dans l'application correspondante, les dérivées de la fonction apparaissent linéairement (contrairement à , par exemple). Puisque la différentiation est une opération linéaire (c'est-à-dire et pour une constante ), cette application est linéaire, appelée opérateur différentiel linéaire . En particulier, les solutions de l'équation différentielle forment un espace vectoriel (sur catégorie des espaces vectoriels (sur un corps fixé ) est une catégorie abélienne , c'est-à-dire un ensemble d'objets mathématiques et d'applications préservant la structure entre eux (une catégorie ) qui se comporte de manière très similaire à la catégorie des groupes abéliens . De ce fait, de nombreux énoncés tels que le premier théorème d'isomorphisme (également appelé théorème du rang-nullité dans le contexte des matrices) et les deuxième et troisième théorèmes d'isomorphisme peuvent être formulés et démontrés d'une manière très similaire aux énoncés correspondants pour les groupes .
produit direct et somme directe
Produit tensoriel
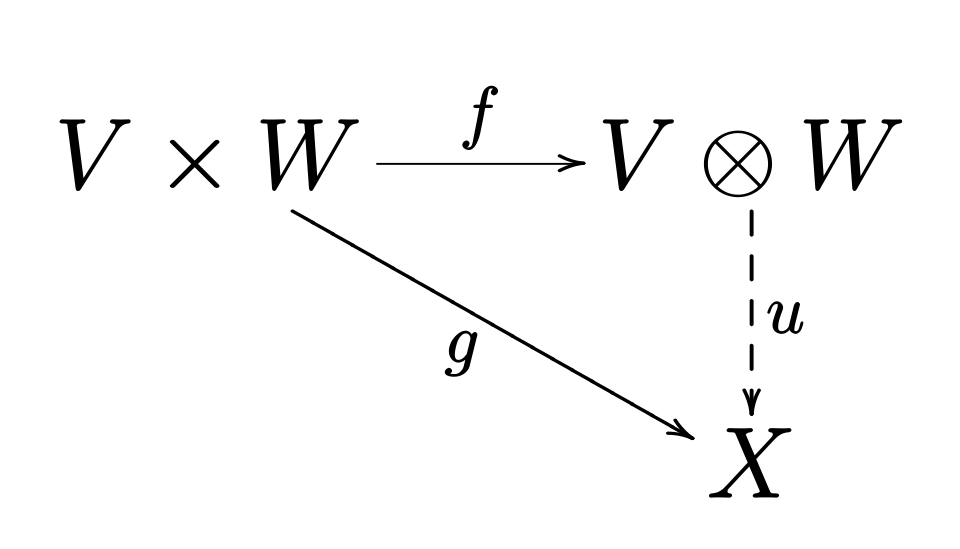
Le produit tensoriel est un espace vectoriel particulier qui reçoit universellement les applications bilinéaires . Il est défini comme l'espace vectoriel constitué de sommes finies (formelles) de symboles appelés tenseurs, soumises aux règles Ces règles garantissent que l'application de l'espace vectoriel vers l' espace vectoriel qui associe un n-uplet à l' espace vectoriel est bilinéaire. L'universalité du produit tensoriel stipule que, pour tout espace vectoriel et toute application bilinéaire, il existe une unique application ( représentée par une flèche en pointillés) dont la composition avec l'espace vectoriel est égale à C'est la propriété universelle du produit tensoriel, une instance de la méthode – très utilisée en algèbre abstraite avancée – qui permet de définir indirectement des objets en spécifiant des applications vers ou depuis cet objet.
Espaces vectoriels avec structure supplémentaire
Du point de vue de l'algèbre linéaire, les espaces vectoriels sont parfaitement compris dans la mesure où tout espace vectoriel sur un corps donné est caractérisé, à isomorphisme près, par sa dimension. Cependant, les espaces vectoriels en eux-mêmes n'offrent pas de cadre pour traiter la question – cruciale en analyse – de la convergence d'une suite de fonctions vers une autre fonction. De même, l'algèbre linéaire n'est pas adaptée au traitement des séries infinies , car l'addition ne permet d'additionner qu'un nombre fini de termes. Par conséquent, les besoins de l'analyse fonctionnelle requièrent la prise en compte de structures supplémentaires.
Un espace vectoriel peut être muni d'un ordre partiel permettant la comparaison de certains vecteurs. Par exemple, l'espace réel de dimension n peut être ordonné en comparant ses vecteurs composante par composante. Les espaces vectoriels ordonnés , tels que les espaces de Riesz , sont fondamentaux pour l'intégration de Lebesgue , qui repose sur la possibilité d'exprimer une fonction comme la différence de deux fonctions positives, où désigne la partie positive et la partie négative de .
Espaces vectoriels normés et espaces préhilbertiens
L'espace des coordonnées peut être muni du produit scalaire standard : celui -ci reflète la notion usuelle d'angle entre deux vecteurs et, par la loi des cosinus , deux vecteurs satisfaisant cette condition sont dits orthogonaux . Une variante importante du produit scalaire standard est utilisée dans l' espace de Minkowski : il est muni du produit de Lorentz Contrairement au produit scalaire standard, il n'est pas défini positif : il prend également des valeurs négatives, par exemple pour . L'isolement de la quatrième coordonnée — correspondant au temps , par opposition aux trois dimensions spatiales — la rend utile pour le traitement mathématique de la relativité restreinte . Notons que, dans d'autres conventions, le temps est souvent écrit comme la première composante, ou « zéro », de sorte que le produit de Lorentz s'écrit .
espaces vectoriels topologiques
Dans de tels espaces vectoriels topologiques, on peut considérer des séries de vecteurs. La somme infinie désigne la limite des sommes partielles finies correspondantes de la suite d'éléments de la série. Par exemple, les fonctions (réelles ou complexes) peuvent appartenir à un espace de fonctions, auquel cas la série est une série de fonctions . Le mode de convergence de la série dépend de la topologie imposée à l'espace de fonctions. Dans de tels cas, la convergence ponctuelle et la convergence uniforme sont deux exemples importants.
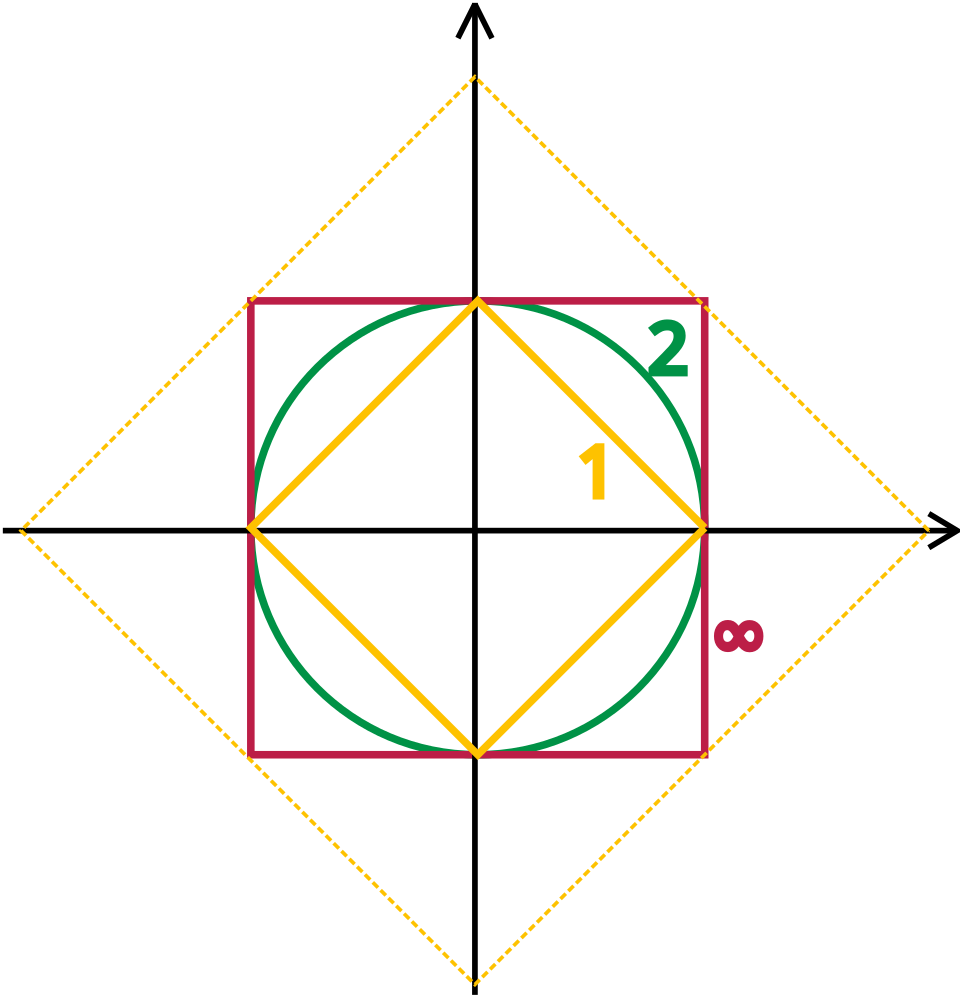
Pour garantir l'existence de limites pour certaines séries infinies, on se restreint aux espaces où toute suite de Cauchy admet une limite ; un tel espace vectoriel est dit complet . En résumé, un espace vectoriel est complet s'il contient toutes les limites nécessaires. Par exemple, l'espace vectoriel des polynômes sur l'intervalle unité, muni de la topologie de convergence uniforme, n'est pas complet car toute fonction continue sur cet espace peut être uniformément approchée par une suite de polynômes, d'après le théorème d'approximation de Weierstrass . En revanche, l'espace de toutes les fonctions continues sur cet espace, muni de la même topologie, est complet . Une norme définit une topologie en affirmant qu'une suite de vecteurs converge vers un vecteur si et seulement si ce vecteur converge. Les espaces de Banach et de Hilbert sont des espaces vectoriels topologiques complets dont les topologies sont respectivement définies par une norme et un produit scalaire. Leur étude, un élément fondamental de l'analyse fonctionnelle , se concentre sur les espaces vectoriels de dimension infinie, car toutes les normes sur les espaces vectoriels topologiques de dimension finie définissent la même notion de convergence. L'image de droite illustre l'équivalence des normes -norme et -norme sur . Les « boules » unitaires s'englobent mutuellement ; une suite converge vers zéro pour une norme si et seulement si elle converge vers zéro pour l'autre norme. Dans le cas infini, cependant, il existe généralement des topologies non équivalentes, ce qui enrichit l'étude des espaces vectoriels topologiques par rapport à celle des espaces vectoriels sans données supplémentaires.
D'un point de vue conceptuel, toutes les notions relatives aux espaces vectoriels topologiques doivent correspondre à la topologie. Par exemple, au lieu de considérer toutes les applications linéaires (ou fonctionnelles ), les applications entre espaces vectoriels topologiques doivent être continues. En particulier, l' espace dual (topologique) est constitué de fonctionnelles continues (ou de ). Le théorème fondamental de Hahn-Banach concerne la séparation des sous-espaces d'espaces vectoriels topologiques appropriés par des fonctionnelles continues.
Espaces de Banach
Un premier exemple est l'espace vectoriel constitué de vecteurs infinis à coefficients réels dont la norme est donnée par
Les topologies sur l'espace de dimension infinie ne sont pas équivalentes pour différentes valeurs de . Par exemple, la suite de vecteurs dont les premières composantes sont et les suivantes convergent vers le vecteur nul pour , mais pas pour .
Plus généralement que les suites de nombres réels, les fonctions sont munies d'une norme qui remplace la somme ci-dessus par l' intégrale de Lebesgue
L'espace des fonctions intégrables sur un domaine donné (par exemple un intervalle) satisfaisant et muni de cette norme est appelé espace de Lebesgue , noté
Ces espaces sont complets. (Si l'on utilise l' intégrale de Riemann , l'espace n'est
L'imposition de conditions de bornitude non seulement sur la fonction, mais aussi sur ses dérivées conduit aux espaces de Sobolev .
Les espaces de produits scalaires complets sont connus sous le nom d'espaces de Hilbert , en l'honneur de David Hilbert . L'espace de Hilbert avec produit scalaire donné par où désigne le conjugué complexe de est un cas clé.
Par définition, dans un espace de Hilbert, toute suite de Cauchy converge vers une limite. Réciproquement, trouver une suite de fonctions aux propriétés souhaitables qui approche une fonction limite donnée est tout aussi crucial. Les premières analyses, sous la forme de l' approximation de Taylor , ont établi une approximation des fonctions différentiables par des polynômes. D'après le théorème de Stone-Weierstrass , toute fonction continue sur ℝⁿ peut être approchée au mieux par un polynôme. Une technique d'approximation similaire par des fonctions trigonométriques est communément appelée développement en série de Fourier et est largement utilisée en ingénierie. Plus généralement, et de manière plus conceptuelle, le théorème fournit une description simple des « fonctions de base », ou, dans les espaces de Hilbert abstraits, des vecteurs de base, qui suffisent à engendrer un espace de Hilbert au sens où l' adhérence de leur espace engendré (c'est-à-dire les combinaisons linéaires finies et leurs limites) est l'espace entier. Un tel ensemble de fonctions est appelé une base et sa cardinalité est appelée la dimension de l'espace de Hilbert . Non seulement le théorème démontre que des fonctions de base appropriées sont suffisantes à des fins d'approximation, mais, combiné au procédé de Gram-Schmidt , il permet également de construire une base de vecteurs orthogonaux . De telles bases orthogonales sont la généralisation, dans l'espace de Hilbert, des axes de coordonnées dans l'espace euclidien de dimension finie .
Les solutions de diverses équations différentielles peuvent être interprétées à l'aide d'espaces de Hilbert. Par exemple, de nombreux domaines de la physique et de l'ingénierie conduisent à de telles équations, et les solutions présentant des propriétés physiques particulières sont fréquemment utilisées comme fonctions de base, souvent orthogonales. À titre d'exemple en physique, l' équation de Schrödinger dépendante du temps en mécanique quantique décrit l'évolution des propriétés physiques au cours du temps au moyen d'une équation aux dérivées partielles , dont les solutions sont appelées fonctions d'onde . Des valeurs définies pour des propriétés physiques telles que l'énergie ou l'impulsion correspondent aux valeurs propres d'un certain opérateur différentiel (linéaire) , et les fonctions d'onde associées sont appelées états propres . Le théorème spectral décompose un opérateur linéaire compact agissant sur des fonctions en fonction de ces fonctions propres et de leurs valeurs propres.
Algèbres sur les corps
Les espaces vectoriels généraux ne possèdent pas de multiplication entre vecteurs. Un espace vectoriel muni d'un opérateur bilinéaire supplémentaire définissant la multiplication de deux vecteurs est une algèbre sur un corps (ou une F -algèbre si le corps F est spécifié).
Par exemple, l'ensemble de tous les polynômes forme une algèbre appelée anneau des polynômes : la somme de deux polynômes étant un polynôme, cet anneau forme un espace vectoriel ; il forme une algèbre puisque le produit de deux polynômes est également un polynôme. Les anneaux de polynômes (à plusieurs variables) et leurs quotients constituent la base de la géométrie algébrique , car ce sont des anneaux de fonctions d'objets géométriques algébriques .
Un autre exemple crucial est celui des algèbres de Lie , qui ne sont ni commutatives ni associatives, mais le fait de ne pas l'être est limité par les contraintes ( désigne le produit de et ) :
- ( anticommutativité ), et
- ( Identité de Jacobi ).
On peut citer comme exemples l'espace vectoriel des matrices -par- , muni du commutateur de deux matrices et doté du produit vectoriel .
L' algèbre tensorielle est une méthode formelle pour additionner des produits à tout espace vectoriel afin d'obtenir une algèbre. En tant qu'espace vectoriel, elle est engendrée par des symboles, appelés tenseurs simples, dont le degré varie. La multiplication est donnée par la concaténation de tels symboles, l'imposition de la distributivité de l'addition et la commutation de la multiplication scalaire avec le produit tensoriel ⊗, de manière analogue au produit tensoriel de deux espaces vectoriels introduit dans la section précédente sur les produits tensoriels . En général, il n'existe aucune relation entre et . Imposer l'égalité à deux tels éléments conduit à l' algèbre symétrique , tandis qu'imposer donne l' algèbre extérieure .
Structures apparentées
faisceaux vectoriels
Les propriétés de certains fibrés vectoriels fournissent des informations sur l'espace topologique sous-jacent. Par exemple, le fibré tangent est l'ensemble des espaces tangents paramétrés par les points d'une variété différentiable. Le fibré tangent du cercle S₁ est globalement isomorphe à champ de vecteurs globalement non nul sur S₁ . En revanche, d'après le théorème de la boule chevelue , il n'existe pas de champ de vecteurs (tangent) non nul partout sur la [ 92 ] théorie étudie les classes d'isomorphisme de tous les fibrés vectoriels sur un espace topologique donné. Outre l'approfondissement de la compréhension topologique et géométrique, elle a des conséquences purement algébriques, telles que la classification des algèbres à division réelles de dimension finie : ℝ , ℂ , les quaternions H et les octonions O.
Le fibré cotangent d'une variété différentiable est constitué, en tout point de la variété, du dual de l'espace tangent, l' espace cotangent . Les sections de ce fibré sont appelées 1-formes différentielles .
Modules
Espaces affines et projectifs
En résumé, les espaces affines sont des espaces vectoriels dont l'origine n'est pas spécifiée. Plus précisément, un espace affine est un ensemble muni d'une action vectorielle transitive libre . En particulier, un espace vectoriel est affine sur lui-même par l'application (x ∈ W) = (x ∈ W) → ( x ∈ W). Si W est un espace vectoriel, alors un sous-espace affine est un sous-ensemble de W obtenu par translation d'un sous-espace vectoriel V par un vecteur fixé classe latérale de V dans W ) et est constitué de tous les vecteurs de la forme section précédente sur les équations linéaires, que l'on peut obtenir en posant ( x ∈ W) = (x ∈ V) dans cette équation. L'espace des solutions est le sous-espace affine noyau de A ).
L'ensemble des sous-espaces unidimensionnels d'un espace vectoriel V de dimension finie fixé est appelé espace projectif ; il peut être utilisé pour formaliser l'idée de droites parallèles se coupant à l'infini. Les grassmanniennes et les variétés de drapeaux généralisent cela en paramétrant respectivement les sous-espaces linéaires de dimension k fixée et les drapeaux des sous-espaces.