En physique et en astronomie , un référentiel (ou système de référence ) est un système de coordonnées abstrait dont l'origine , l'orientation et l'échelle sont définies dans l'espace physique . Il repose sur un ensemble de points de référence , définis comme des points géométriques dont la position est identifiée à la fois mathématiquement (par des valeurs de coordonnées numériques) et physiquement (signalée par des repères conventionnels). Un cas particulier important est celui du référentiel inertiel , un référentiel stationnaire ou en mouvement uniforme.
Pour un système à n dimensions, n + 1 points de référence suffisent à définir complètement un repère. En utilisant des coordonnées cartésiennes rectangulaires , un repère peut être défini avec un point de référence à l'origine et un point de référence à une distance unitaire de l'origine sur chacun des n axes de coordonnées .
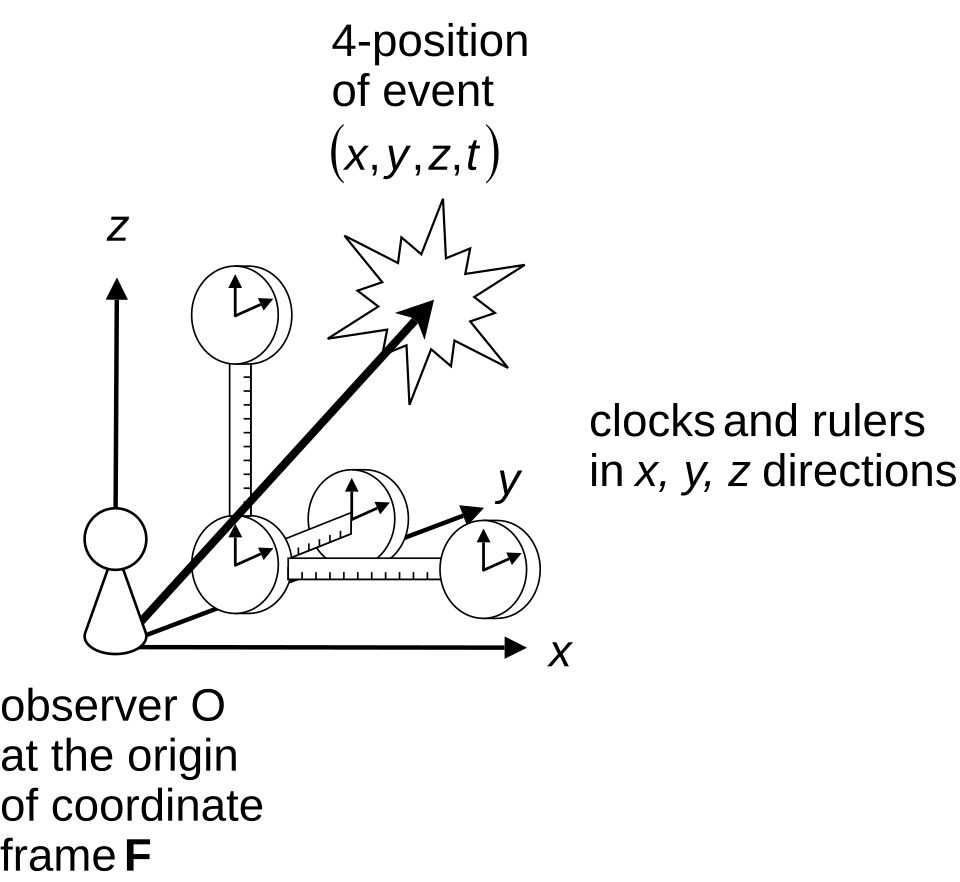
En relativité einsteinienne , les référentiels servent à définir la relation entre un observateur en mouvement et le phénomène observé. Dans ce contexte, on parle souvent de référentiel d'observation , ce qui implique que l'observateur est immobile dans ce référentiel, sans pour autant être nécessairement situé à son origine . Un référentiel relativiste inclut (ou implique) le temps de coordonnées , qui n'est pas identique dans tous les référentiels en mouvement relatif . La situation diffère donc de la relativité galiléenne , où tous les temps de coordonnées possibles sont essentiellement équivalents.
Définition
La nécessité de distinguer les différentes significations de l’expression « référentiel » a donné lieu à une variété de termes. Par exemple, on qualifie parfois le type de système de coordonnées, comme dans « référentiel cartésien ». On met parfois l’accent sur l’état de mouvement, comme dans « référentiel tournant » . On souligne parfois la manière dont il se transforme en référentiels considérés comme liés, comme dans « référentiel galiléen » . Enfin, on distingue parfois les référentiels selon l’échelle de leurs observations, comme dans « référentiel macroscopique » et « référentiel microscopique » .
Dans cet article, le terme « référentiel d'observation » est employé lorsque l'accent est mis sur l' état de mouvement plutôt que sur le choix des coordonnées ou la nature des observations ou de l'appareillage. En ce sens, un référentiel d'observation permet d'étudier l'effet du mouvement sur toute une famille de systèmes de coordonnées qui pourraient lui être rattachés. Par ailleurs, un système de coordonnées peut être utilisé à de nombreuses fins où l'état de mouvement n'est pas l'élément principal. Par exemple, un système de coordonnées peut être adopté pour tirer parti de la symétrie d'un système. Dans une perspective encore plus large, la formulation de nombreux problèmes de physique utilise des coordonnées généralisées , des modes normaux ou des vecteurs propres , qui ne sont liés qu'indirectement à l'espace et au temps. Il semble utile de dissocier les différents aspects d'un référentiel pour la discussion qui suit. Nous considérons donc les référentiels d'observation, les systèmes de coordonnées et l'appareillage comme des concepts indépendants, présentés ci-dessous :
- Un référentiel d'observation (tel qu'un référentiel inertiel ou un référentiel non inertiel ) est un concept physique lié à l'état de mouvement.
- Un système de coordonnées est un concept mathématique, correspondant au choix d'un langage utilisé pour décrire des observations. Par conséquent, un observateur, dans un référentiel d'observation donné, peut choisir d'utiliser n'importe quel système de coordonnées (cartésien, polaire, curviligne, généralisé, etc.) pour décrire les observations effectuées depuis ce référentiel. Le choix de ce système de coordonnées ne modifie pas l'état de mouvement de l'observateur et n'entraîne donc pas de changement de son référentiel d'observation . Ce point de vue est également partagé ailleurs. Il ne s'agit pas pour autant de nier que certains systèmes de coordonnées peuvent être plus adaptés à certaines observations que d'autres.
- Le choix de ce qu'il faut mesurer et de l'appareil d'observation utilisé est une question distincte de l'état de mouvement de l'observateur et du choix du système de coordonnées.
Systèmes de coordonnées
Bien que le terme « système de coordonnées » soit souvent utilisé (notamment par les physiciens) dans un sens non technique, il a une signification précise en mathématiques, et c'est parfois ce que le physicien entend également.
Un système de coordonnées en mathématiques est une facette de la géométrie ou de l' algèbre , en particulier, une propriété des variétés (par exemple, en physique, des espaces de configuration ou des espaces de phase ). Les coordonnées d'un point r dans un espace à n dimensions sont simplement un ensemble ordonné de n nombres :
Dans un espace de Banach général , ces nombres pourraient être (par exemple) des coefficients d'un développement fonctionnel tel qu'une série de Fourier . Dans un problème physique, il pourrait s'agir de coordonnées spatio-temporelles ou d'amplitudes de modes normaux . Dans la conception d'un robot , il pourrait s'agir d'angles de rotations relatives, de déplacements linéaires ou de déformations articulaires . Nous supposerons ici que ces coordonnées peuvent être reliées à un système de coordonnées cartésiennes par un ensemble de fonctions :
où x , y , z , etc. sont les n coordonnées cartésiennes du point. Étant donné ces fonctions, les surfaces de coordonnées sont définies par les relations suivantes :
L'intersection de ces surfaces définit des lignes de coordonnées . En tout point choisi, les tangentes aux lignes de coordonnées sécantes en ce point définissent un ensemble de vecteurs de base { e 1 , e 2 , ..., e n } en ce point. C'est-à-dire :
qui peut être normalisée à une longueur unitaire. Pour plus de détails, voir les coordonnées curvilignes .
Les surfaces de coordonnées, les lignes de coordonnées et les vecteurs de base sont des composantes d'un système de coordonnées . Si les vecteurs de base sont orthogonaux en chaque point, le système de coordonnées est un système de coordonnées orthogonal .
Un aspect important d'un système de coordonnées est son tenseur métrique g ik , qui détermine la longueur d'arc ds dans le système de coordonnées en fonction de ses coordonnées :
où les indices répétés sont additionnés.
Comme le montrent ces remarques, un système de coordonnées est une construction mathématique , faisant partie d'un système axiomatique . Il n'existe aucun lien nécessaire entre les systèmes de coordonnées et le mouvement physique (ou tout autre aspect de la réalité). Cependant, les systèmes de coordonnées peuvent inclure le temps comme coordonnée et servir à décrire le mouvement. Ainsi, les transformations de Lorentz et les transformations galiléennes peuvent être considérées comme des transformations de coordonnées .
cadre de référence observationnel

Un référentiel d'observation , souvent appelé référentiel physique , référentiel ou simplement référentiel , est un concept physique lié à un observateur et à son état de mouvement. Nous adoptons ici le point de vue de Kumar et Barve : un référentiel d'observation est caractérisé uniquement par son état de mouvement . Cependant, ce point ne fait pas l'unanimité. En relativité restreinte , on distingue parfois un observateur et un référentiel . Selon cette conception, un référentiel est constitué d'un observateur et d'un réseau de coordonnées construit comme un ensemble orthonormé direct de vecteurs spatiaux perpendiculaires à un vecteur temporel. Voir Doran . Cette conception restrictive n'est pas utilisée ici et n'est pas universellement adoptée, même dans les discussions sur la relativité . En relativité générale, l'utilisation de systèmes de coordonnées généraux est courante (voir, par exemple, la solution de Schwarzschild pour le champ gravitationnel à l'extérieur d'une sphère isolée ).
Il existe deux types de référentiels d'observation : inertiel et non inertiel . Un référentiel inertiel est défini comme un référentiel dans lequel toutes les lois de la physique prennent leur forme la plus simple. En relativité restreinte, ces référentiels sont liés par des transformations de Lorentz , paramétrées par la rapidité . En mécanique newtonienne, une définition plus restrictive exige seulement que la première loi de Newton soit vérifiée ; autrement dit, un référentiel inertiel newtonien est un référentiel dans lequel une particule libre se déplace en ligne droite à vitesse constante , ou est au repos. Ces référentiels sont liés par des transformations galiléennes . Ces transformations relativistes et newtoniennes s'expriment dans des espaces de dimension quelconque à l'aide de représentations du groupe de Poincaré et du groupe galiléen .
Contrairement au référentiel inertiel, un référentiel non inertiel est un référentiel dans lequel des forces fictives doivent être invoquées pour expliquer les observations. Un exemple est celui d'un référentiel d'observation centré sur un point à la surface de la Terre. Ce référentiel orbite autour du centre de la Terre, ce qui introduit les forces fictives que sont la force de Coriolis , la force centrifuge et la force gravitationnelle . (Toutes ces forces, y compris la gravité, disparaissent dans un référentiel véritablement inertiel, c'est-à-dire celui de la chute libre.)
Appareil de mesure
Un autre aspect de la notion de référentiel concerne le rôle de l' appareil de mesure (par exemple, horloges et étalons) qui y est rattaché (voir la citation de Norton ci-dessus). Cette question n'est pas abordée dans cet article et revêt un intérêt particulier en mécanique quantique , où la relation entre observateur et mesure fait encore l'objet de discussions (voir le problème de la mesure ).
En physique expérimentale, le référentiel dans lequel les instruments de mesure du laboratoire sont immobiles est généralement appelé référentiel du laboratoire , ou simplement « référentiel labo ». Par exemple, le référentiel dans lequel les détecteurs d'un accélérateur de particules sont immobiles. Dans certaines expériences, le référentiel du laboratoire est un référentiel inertiel, mais ce n'est pas une obligation (par exemple, le laboratoire situé à la surface de la Terre dans de nombreuses expériences de physique n'est pas inertiel). En physique des particules, il est souvent utile de convertir l'énergie et l'impulsion des particules du référentiel du laboratoire où elles sont mesurées vers le référentiel du centre de masse (ou référentiel COM), dans lequel les calculs sont parfois simplifiés, car toute l'énergie cinétique potentiellement présente dans le référentiel COM peut servir à la création de nouvelles particules.
À ce propos, il convient de noter que les horloges et les barres souvent utilisées pour décrire en théorie l'équipement de mesure des observateurs sont en pratique remplacées par une métrologie beaucoup plus complexe et indirecte , liée à la nature du vide , et utilisant des horloges atomiques fonctionnant selon le Modèle Standard et qui doivent être corrigées de la dilatation temporelle gravitationnelle . (Voir seconde , mètre et kilogramme ).
En fait, Einstein estimait que les horloges et les bâtonnets n'étaient que des instruments de mesure pratiques et qu'ils devaient être remplacés par des entités plus fondamentales basées, par exemple, sur les atomes et les molécules.
Généralisation
Brading et Castellani étendent la discussion au-delà des systèmes de coordonnées spatio-temporelles simples . L'extension aux systèmes de coordonnées utilisant des coordonnées généralisées sous-tend les formulations hamiltoniennes et lagrangiennes de la théorie quantique des champs , de la mécanique relativiste classique et de la gravité quantique .
Instances
- Système de référence terrestre international
- Système de référence céleste international
- En mécanique des fluides, spécification lagrangienne et eulérienne du champ d'écoulement
- Autres cadres