La robotique est l' étude et la pratique interdisciplinaires de la conception, de la construction , du fonctionnement et de l'utilisation des robots . Un roboticien est une personne spécialisée en robotique. La robotique combine généralement quatre aspects du travail de conception : une source d'énergie (par exemple une batterie ), une construction mécanique , un système de contrôle ( circuits électriques ) et un logiciel (exécuté par télécommande ou intelligence artificielle ).
L'objectif de la plupart des projets de robotique est de concevoir des machines capables d'assister les humains dans divers domaines, tels que l'agriculture , la construction , les travaux domestiques , la transformation des aliments, la gestion des stocks , la fabrication , la médecine , le secteur militaire , l'exploitation minière , l'exploration spatiale et les transports .
Les robots ont un impact sur les humains en remplaçant des travailleurs . Certains prévoient une accélération de ce phénomène, ce qui a conduit à des solutions telles que le revenu de base . La robotique est un secteur lucratif qui crée des emplois, notamment pour les jeunes diplômés . Les roboticiens s'efforcent souvent de créer des machines capables d'interagir naturellement avec les humains. Ce domaine fait l'objet de recherches et de développements actifs , avec des axes de recherche tels que la cinématique des robots et la robotique quantique .
robot :- Source d'énergie : Les sources d'énergie potentielles comprennent l'électricité filaire, une batterie et/ou de l'essence .
- Construction mécanique : Une forme physique ou une combinaison de formes est conçue pour accomplir fonctionnellement des tâches dans un environnement donné. Cela peut inclure des éléments de locomotive tels que des roues et des chenilles , ainsi que des membres hydrauliques et des manipulateurs (par exemple des mains).
- Système de contrôle : Des circuits électriques (utilisant des composants tels que des diodes et des transistors ) sont utilisés pour exécuter le logiciel, contrôler le mouvement du moteur et lire les capteurs .
- Logiciel : Un programme définit les instructions d’un robot quant au moment et à la manière d’agir. Les programmes robotiques peuvent être exécutés par télécommande , par intelligence artificielle (IA) ou par une approche hybride. La programmation par IA est essentielle à la navigation robotique et à l’interaction homme-robot .
Source d'alimentation
De nombreux types de batteries peuvent servir de source d'énergie. La plupart sont des batteries au plomb , sûres et ayant une durée de vie relativement longue, mais assez lourdes comparées aux batteries argent-cadmium , beaucoup plus compactes et bien plus coûteuses. La conception d'un robot alimenté par batterie doit prendre en compte des facteurs tels que la sécurité, la durée de vie et le poids.
Des générateurs, souvent des moteurs à combustion interne , peuvent également être utilisés, mais ils sont souvent complexes et peu efficaces. Par ailleurs, un câble pourrait relier le robot à une source d'alimentation, ce qui permettrait de gagner du poids et de l'espace, mais nécessiterait un câble encombrant. Les sources d'énergie potentielles comprennent :
- stockage d'énergie par volant d'inertie
- Hydraulique
- Nucléaire
- Déchets organiques (par digestion anaérobie )
- Pneumatique (gaz comprimés)
- Énergie solaire
construction mécanique
Les actionneurs sont les « muscles » d'un robot, les éléments qui convertissent l'énergie stockée en mouvement. Les actionneurs les plus courants sont les moteurs électriques qui font tourner une roue ou un engrenage et les actionneurs linéaires qui contrôlent les robots industriels . La plupart des robots utilisent des moteurs électriques — souvent des moteurs à courant continu (CC ) avec ou sans balais pour les robots portables, ou des moteurs à courant alternatif (CA) pour les robots industriels et les machines à commande numérique par ordinateur (CNC) — notamment dans les systèmes à faible charge et où le mouvement prédominant est la rotation. Les actionneurs linéaires, quant à eux, effectuent un mouvement de va-et-vient et permettent souvent des changements de direction plus rapides, en particulier lorsque des forces importantes sont nécessaires, comme en robotique industrielle. Ils sont généralement alimentés par huile ou air comprimé , mais peuvent également être alimentés par l'électricité, généralement via un moteur et une vis sans fin . Le système pignon-crémaillère est fréquent.
Les moteurs piézoélectriques , notamment les moteurs ultrasoniques , constituent une alternative récente aux moteurs à courant continu. Dans ces moteurs, de minuscules éléments piézoélectriques vibrent des milliers de fois par seconde, induisant un mouvement linéaire ou rotatif. Un type de moteur utilise la vibration de ces éléments pour effectuer un déplacement circulaire ou rectiligne ; un autre type les utilise pour faire vibrer un écrou ou actionner une vis. Ces moteurs présentent l’avantage d’ une résolution nanométrique , d’une vitesse et d’une force importantes pour leur taille.
L'actionnement élastique en série (AES) repose sur l'introduction d'une élasticité intentionnelle entre l'actionneur et la charge pour un contrôle robuste de la force. Grâce à la réduction de l'inertie réfléchie qui en résulte, l'actionnement élastique en série améliore la sécurité lors des interactions ou collisions entre robots . De plus, il offre une efficacité énergétique et une absorption des chocs (filtrage mécanique) tout en réduisant l'usure excessive de la transmission et des autres composants. Cette approche a été employée avec succès dans divers robots, notamment les robots de fabrication avancée et les robots humanoïdes marcheurs . La conception du contrôleur d'un actionneur élastique en série est le plus souvent réalisée dans le cadre de la passivité , car elle garantit la sécurité des interactions avec des environnements non structurés . Cependant, ce cadre présente des limitations importantes imposées au contrôleur, ce qui peut impacter les performances Les muscles artificiels pneumatiques , également appelés muscles à air, sont des tubes spéciaux qui se dilatent (généralement jusqu'à 42 %) lorsqu'on y insuffle de l'air ; ils sont utilisés dans certaines applications robotiques. Les fils musculaires, aussi appelés alliages à mémoire de forme , sont des matériaux qui se contractent (moins de 5 %) lorsqu'un courant électrique leur est appliqué ; ils ont été utilisés pour certains petits robots. Les polymères électroactifs sont des matériaux plastiques capables de se contracter considérablement (jusqu'à 380 % de déformation d'activation) sous l'effet de l'électricité et ont été utilisés dans les muscles faciaux et les bras de robots humanoïdes, ainsi que pour permettre à de nouveaux robots de flotter, de voler, de nager ou de marcher. Par ailleurs, les nanotubes de carbone élastiques constituent une technologie prometteuse de muscles artificiels expérimentaux. L'absence de défauts dans les nanotubes de carbone permet à ces filaments de se déformer élastiquement de plusieurs pour cent, avec des niveaux de stockage d'énergie pouvant atteindre 10 J /cm³ pour les nanotubes métalliques. Les biceps humains pourraient être remplacés par un fil de ce matériau mesurant 8 millimètres ( 3 ⁄ 8 pouces) de diamètre, permettant ainsi aux futurs robots de surpasser les humains.
Locomotion

Plusieurs robots bipèdes ont été conçus, mais leur mobilité n'est pas encore aussi fiable que celle d'un humain. De nombreux autres robots, capables de marcher sur plus de deux pattes, sont nettement plus faciles à manipuler. Les robots bipèdes pourraient être utilisés sur des terrains accidentés, offrant une grande mobilité et une efficacité accrue, mais les robots bipèdes ne peuvent actuellement évoluer que sur des sols plats, voire dans des escaliers. Parmi les approches envisagées :
- Le point de moment nul (ZMP) est l'algorithme utilisé par des robots comme ASIMO de Honda . L'ordinateur de bord du robot s'efforce de maintenir la somme des forces d'inertie (combinaison de la gravité terrestre et des accélérations et décélérations liées à la marche) exactement opposée à la force de réaction du sol (la force exercée par le sol sur le pied du robot). Ainsi, les deux forces s'annulent, ne laissant subsister aucun moment (force susceptible de faire pivoter le robot et de le faire tomber). Des observateurs humains remarquent que ce mode de marche diffère de celui d'un humain, certains décrivant la démarche d'ASIMO comme ressemblant à celle d'un robot ayant besoin d'aller aux toilettes. L'algorithme de marche d'ASIMO utilise un système d'équilibrage dynamique, mais nécessite une surface plane.
- Plusieurs robots, construits dans les années 1980 par Marc Raibert au Laboratoire de la jambe du MIT , ont démontré avec succès une marche très dynamique. Initialement, un robot unijambiste, doté d'un très petit pied, pouvait se maintenir en équilibre en sautillant . Le mouvement est similaire à celui d'une personne sur un bâton sauteur . Lorsque le robot basculait d'un côté, il effectuait un léger saut dans cette direction pour se rattraper. Rapidement, l'algorithme a été généralisé aux robots à deux et quatre pattes. Un robot bipède a été capable de courir et même d'effectuer des sauts périlleux . Un quadrupède a également été présenté, capable de trotter , courir, marcher à petits pas et bondir.
- Une approche plus avancée consiste en un algorithme d'équilibrage dynamique, qui surveille constamment le mouvement du robot et place les pieds pour maintenir la stabilité. Cette technique a été démontrée par le robot Dexter d' Anybots (qui est si stable qu'il peut effectuer des sauts) et Flame de l'Université de Delft .
- L’approche la plus prometteuse utilise peut-être la dynamique passive , dans laquelle l’ élan des membres oscillants est utilisé pour la marche rapide, augmentant peut-être l’efficacité jusqu’à dix fois celle de ZMP.
Un avion de ligne moderne est essentiellement un robot volant , piloté par deux humains. Le pilote automatique contrôle l'appareil au décollage, en vol et à l'atterrissage. Les drones ( véhicules aériens sans pilote) peuvent être plus petits et plus légers, et voler en territoire dangereux à des fins militaires, voire être activés pour le tir automatique. Parmi les autres robots volants, on peut citer les missiles de croisière , l' entomoptère et le micro-hélicoptère robotisé Epson . De plus, certains robots plus légers que l'air sont propulsés par des pales et guidés par sonar.
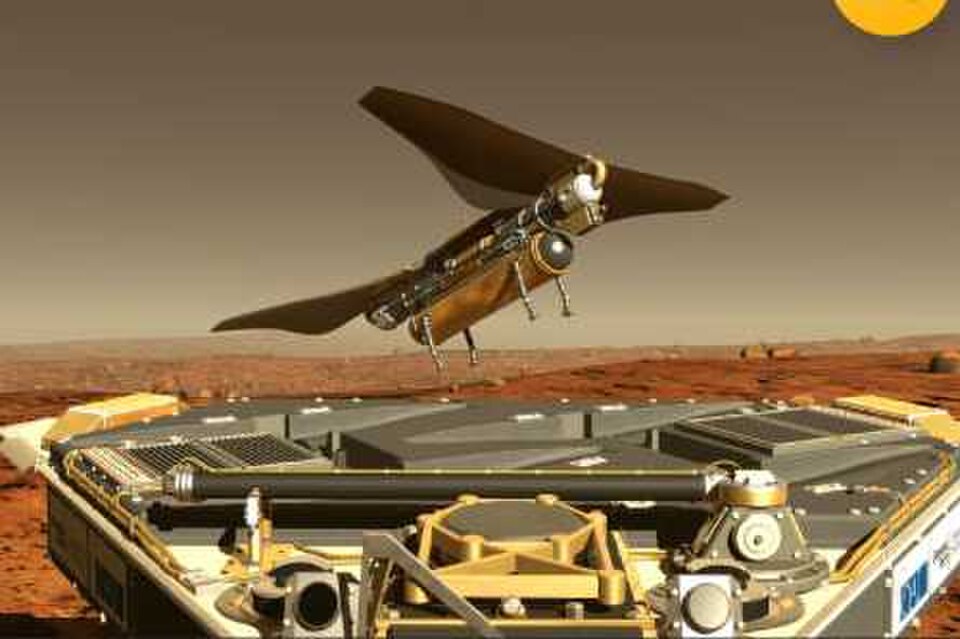
Les robots volants biomimétiques (RVB) s'inspirent des mammifères, des oiseaux ou des insectes volants. Ils peuvent être dotés d'ailes battantes, qui génèrent la portance et la poussée, ou être propulsés par des hélices. Les modèles à ailes battantes offrent une maniabilité accrue et une consommation d'énergie réduite par rapport aux modèles à hélices. Les RVB inspirés des mammifères et des oiseaux partagent des caractéristiques de vol et des considérations de conception similaires. Par exemple, ils minimisent le flottement en bord de vol et le gauchissement de l'extrémité de l'aile induit par la pression en augmentant la rigidité du bord d'attaque.
- Les BFR inspirés des mammifères s'inspirent généralement des chauves-souris, l' écureuil volant ayant également inspiré un prototype. Ces BFR peuvent être conçus pour être multimodaux, capables à la fois de vol et de déplacement terrestre. Des amortisseurs peuvent être intégrés pour réduire l'impact à l'atterrissage. Le BFR peut également cabrer pour augmenter la résistance à l'air . Différents modes de locomotion terrestre peuvent également être implémentés.
- Les robots volants inspirés des oiseaux peuvent s'inspirer des rapaces , des goélands et d'autres espèces. Leurs ailes peuvent être dotées de plumes afin d'accroître l'angle de vol du robot avant le décrochage. Les ailes de ces robots permettent une déformation dans leur plan, ajustable pour optimiser l'efficacité du vol en fonction de la démarche.
- Les BFR inspirés des insectes s'inspirent généralement des coléoptères ou des libellules.
Plusieurs approches ont été utilisées pour développer des robots capables d'escalader des surfaces verticales. L'une d'elles imite les mouvements d'un grimpeur humain sur un mur présentant des aspérités : ajustement du centre de gravité et déplacement successif de chaque membre pour créer un effet de levier . Une autre approche exploite la technique de déplacement par coussinets plantaires des geckos grimpeurs , capables de se déplacer sur des surfaces lisses comme le verre vertical , un exemple étant Speedy Freelander . Une troisième approche consiste à imiter le mouvement d'un serpent grimpant à un poteau . Par ailleurs, les robots serpents peuvent être utilisés pour la navigation horizontale, potentiellement capables d'explorer des espaces confinés et de se déplacer de manière amphibie
On estime que certains poissons peuvent atteindre une efficacité propulsive supérieure à 90 % en nageant . De plus, ils accélèrent et manœuvrent bien mieux que n'importe quel bateau ou sous-marin , tout en causant moins de perturbations, une capacité précieuse pour les robots aquatiques , dont l'un modélise la locomotion des poissons . Un exemple imite la forme hydrodynamique et la propulsion des nageoires antérieures des manchots . D'autres reproduisent la locomotion des raies manta et des méduses . En 2013, un poisson robotisé a surpassé certains poissons réels en termes de vitesse maximale moyenne et d'endurance
Des robots voiliers, comme Vaimos , ont été développés pour effectuer des mesures à la surface de l'océan. Propulsés par le vent, ces robots n'ont besoin de batteries que pour alimenter l'ordinateur, les systèmes de communication et les actionneurs (permettant de régler le gouvernail et la voile). Deux compétitions majeures de robots voiliers ont lieu lors du Microtransat Challenge et du Championnat du monde de voile robotique .
Manipulateurs

La manipulation robotique a été définie par Matthew T. Mason comme le « contrôle de l'environnement par le robot grâce à un contact sélectif » . Les robots doivent manipuler des objets : les saisir, les modifier, les détruire, les déplacer ou agir sur eux de toute autre manière. Un bras robotique est ainsi appelé manipulateur et son extrémité fonctionnelle (par exemple, un outil ou une main) est appelée effecteur terminal . La plupart des bras robotiques possèdent des effecteurs terminaux interchangeables, chacun leur permettant d'effectuer un ensemble limité de tâches. Certains sont dotés d'un manipulateur fixe non remplaçable, notamment des manipulateurs très polyvalents comme la main humanoïde . Certains de ces manipulateurs possèdent une intelligence de dextérité performante, jusqu'à 20 degrés de liberté , et des centaines de capteurs tactiles
L'un des types d'effecteurs terminaux les plus courants est la pince. Dans sa forme la plus simple, elle se compose de deux doigts qui peuvent s'ouvrir et se fermer pour saisir et relâcher de petits objets. Ces doigts peuvent être constitués d'une chaîne traversée par un fil métallique. Parmi les mains qui ressemblent davantage à une main humaine et fonctionnent de manière similaire, on peut citer la Shadow Hand et la main Robonaut . Les pinces mécaniques se déclinent en différents types, notamment les pinces à friction et les pinces enveloppantes. Les pinces à friction utilisent toute la force de la pince pour maintenir l'objet en place grâce à la friction. Les pinces enveloppantes, quant à elles, maintiennent l'objet en place en utilisant moins de friction.
Les effecteurs à succion, alimentés par des générateurs de vide, sont des dispositifs astrictifs très simples capables de maintenir des charges très importantes à condition que la surface de préhension soit suffisamment lisse pour assurer l'aspiration. Les robots de prélèvement et de placement de composants électroniques et d'objets volumineux tels que les pare-brise de voiture utilisent souvent des effecteurs à vide très simples. L'aspiration est un type d'effecteur largement utilisé dans l'industrie, notamment parce que la souplesse naturelle des effecteurs à succion réduit le risque d'endommager les objets.
Système de contrôle
La structure mécanique d'un robot doit être contrôlée pour accomplir des tâches. Le contrôle d'un robot comprend trois phases distinctes : la perception , le traitement et l'action ( paradigmes robotiques ). Les capteurs fournissent des informations sur l'environnement ou sur le robot lui-même (par exemple, la position de ses articulations ou de son effecteur terminal). Ces informations sont ensuite traitées pour être stockées ou transmises, et pour calculer les signaux appropriés destinés aux actionneurs (moteurs), qui déplacent la structure mécanique afin de réaliser les mouvements coordonnés ou les actions de force requis.
La complexité de la phase de traitement peut varier. À un niveau réactif, elle peut traduire directement les informations brutes des capteurs en commandes d'actionneurs (par exemple, commander les portes électroniques de puissance du moteur en fonction des signaux de retour de l'encodeur afin d'obtenir le couple/la vitesse requis de l'arbre). La fusion de données de capteurs et des modèles internes peuvent être utilisés pour estimer les paramètres d'intérêt (par exemple, la position de la pince du robot) à partir de données de capteurs bruitées. Une tâche immédiate (comme déplacer la pince dans une direction donnée jusqu'à la détection d'un objet par un capteur de proximité) est parfois déduite de ces estimations. Des techniques de la théorie du contrôle sont généralement utilisées pour convertir les tâches de haut niveau en commandes individuelles qui pilotent les actionneurs, le plus souvent à l'aide de modèles cinématiques et dynamiques de la structure mécanique.
À plus long terme ou pour des tâches plus complexes, le robot peut avoir besoin de construire et de raisonner avec un modèle cognitif , qui tente de représenter le robot, le monde et leurs interactions. La reconnaissance de formes et la vision par ordinateur peuvent être utilisées pour suivre les objets. La cartographie , la planification de mouvement et d'autres techniques d'IA peuvent être utilisées pour déterminer comment agir et éviter les obstacles.
Les systèmes de commande robotiques intègrent de multiples capteurs et effecteurs, possèdent de nombreux degrés de liberté interagissant et nécessitent des interfaces opérateur, des outils de programmation et des capacités temps réel . Ils sont souvent connectés à des réseaux de communication plus vastes, notamment l' Internet des objets (IoT) , un réseau reliant des objets physiques. Les progrès vers des robots interconnectés à architecture ouverte , multicouches, conviviaux et « intelligents », basés sur des capteurs, découlent de concepts antérieurs liés aux systèmes de production flexibles . De plus, plusieurs architectures de référence « ouvertes » ou « hybrides » offrent des avantages par rapport aux anciens systèmes de commande robotiques « fermés ». Les contrôleurs à architecture ouverte sont réputés mieux à même de répondre aux exigences croissantes d'un large éventail d'utilisateurs de robots, notamment les développeurs de systèmes, les utilisateurs finaux et les chercheurs, et sont mieux placés pour contribuer à l'élaboration de concepts industriels avancés . Outre l'utilisation de nombreuses fonctionnalités établies des contrôleurs de robots, telles que le contrôle de la position, de la vitesse et de la force des effecteurs terminaux, ils le contrôle flou et le contrôle basé sur les réseaux de neurones artificiels . Lorsqu'elles sont mises en œuvre en temps réel, ces techniques peuvent potentiellement permettre des systèmes de contrôle plus adaptatifs lors de l'utilisation dans des environnements inconnus. Une architecture de référence générique et l'implémentation associée d'un robot et d'un contrôleur interconnectés et à architecture ouverte ont été utilisées dans plusieurs études.
Détection
Les capteurs permettent aux robots de recevoir des informations sur leur environnement ou leurs composants internes. Ceci est essentiel pour que les robots puissent accomplir leurs tâches et réagir aux changements de manière appropriée. Les capteurs sont utilisés pour diverses mesures, fournissent des informations en temps réel et alertent les robots ; il peut s’agir de caméras et de microphones, ainsi que de capteurs surveillant les signaux réseau, le niveau de puissance, la pression et la température.
Les mains robotiques et prothétiques actuelles reçoivent beaucoup moins d'informations tactiles que la main humaine. Des recherches récentes ont permis de développer un réseau de capteurs tactiles qui imite les propriétés mécaniques et les récepteurs tactiles du bout des doigts humains. Ce réseau est constitué d'un noyau rigide entouré d'un fluide conducteur contenu dans une peau élastomère. Des électrodes sont fixées à la surface du noyau rigide et reliées à un dispositif de mesure d'impédance situé à l'intérieur. Lorsque la peau artificielle entre en contact avec un objet, le fluide circulant autour des électrodes se déforme, produisant des variations d'impédance qui permettent de cartographier les forces exercées par l'objet. Une fonction importante des doigts artificiels sera probablement d'ajuster la préhension des objets. Des scientifiques de plusieurs pays européens et d'Israël ont développé en 2009 une prothèse de main fonctionnant comme une main naturelle : elle permet aux patients d'écrire, de taper au clavier et d'effectuer d'autres mouvements fins. Cette prothèse est équipée de capteurs permettant au patient de percevoir son environnement par le bout des doigts.
D'autres formes courantes de détection en robotique utilisent le lidar , le radar et le sonar . Le lidar mesure la distance à une cible en l'illuminant avec un faisceau laser et en mesurant la lumière réfléchie à l'aide d'un capteur. Le radar utilise les ondes radio pour déterminer la distance, l'angle ou la vitesse des objets. Le sonar utilise la propagation du son pour naviguer, communiquer avec ou détecter des objets à la surface ou sous l'eau. Plus abstraitement, des formes de robots inspirées de l'origami sont conçues pour percevoir et analyser des environnements extrêmes.
Les caméras peuvent capturer la lumière visible et d'autres formes de rayonnement électromagnétique, comme l'infrarouge . Plusieurs capteurs et des objectifs spécifiques peuvent être utilisés pour obtenir un champ de vision et une perception de la profondeur précis . La vision par ordinateur recourt de plus en plus à l'apprentissage automatique . La lecture de codes-barres peut être utilisée, mais son efficacité n'est pas garantie dans tous les cas.
Logiciel

Un programme définit les actions qu'un robot doit entreprendre, notamment le moment et la manière de les réaliser. Des mouvements spécifiques peuvent être conçus à l'aide de logiciels d'animation 3D tels qu'Autodesk Maya . Les programmes peuvent être exécutés par télécommande , par intelligence artificielle ou par une approche hybride.
Un robot doté d'une programmation de télécommande, éventuellement actionné par des dispositifs haptiques ou téléopérés , possède un ensemble préexistant de commandes qu'il exécutera lorsqu'il recevra un signal d'une source de contrôle — essentiellement une forme d' automatisation sur laquelle les humains ont un contrôle étendu.
Parallèlement, les robots autonomes assistés par l'IA fonctionnent sans source de contrôle et utilisent leur programmation pour déterminer leurs réponses à divers stimuli. Les machines hautement prévisibles, telles que les robots industriels, ne nécessitent généralement pas de cognition complexe.
Les robots hybrides peuvent être assistés par un opérateur qui sélectionne certains modes ou commande des actions générales, l'IA déterminant les mouvements nécessaires.
Navigation et évitement des collisions
Les robots capables de fonctionner de manière autonome dans un environnement dynamique nécessitent une combinaison de matériel et de logiciels de cartographie et de navigation pour se déplacer dans leur environnement et éviter les collisions avec d'autres objets. Outre les humanoïdes tels que les robots ASIMO et Meinü , cela s'applique particulièrement aux voitures autonomes , qui utilisent diverses technologies telles que le système de positionnement global (GPS), le radar, le lidar, les caméras, un système de navigation inertielle et/ou des essaims de robots autonomes.
interaction homme-robot
D'autres obstacles se présentent lorsque la voix est utilisée pour interagir avec les humains. Pour des raisons sociales, la voix de synthèse s'avère un moyen de communication sous-optimal , ce qui rend nécessaire le développement de la composante émotionnelle de la voix robotique par diverses techniques . L'un des premiers exemples est un robot enseignant développé en 1974 par Michael J. Freeman [ , qui convertissait la mémoire numérique en une parole verbale rudimentaire grâce à des disques informatiques préenregistrés . Le robot de Freeman était programmé pour enseigner aux élèves du Bronx , New York
Par ailleurs, la reconnaissance vocale en temps réel est une tâche complexe pour un ordinateur, principalement en raison de la grande variabilité de la parole. La prononciation d'un mot peut varier considérablement selon l'accent , l'acoustique , le volume, le mot précédent et l'état de santé du locuteur. Des progrès considérables ont été réalisés dans ce domaine depuis la conception du premier système de saisie vocale en 1952. À la fin du XXe siècle, les meilleurs systèmes pouvaient reconnaître un discours naturel et continu jusqu'à 160 mots par minute avec une précision de 95 %. Les machines dotées d'intelligence artificielle peuvent utiliser la voix pour identifier les émotions . Les robots sociaux devront probablement être capables de reconnaître les gestes (et peut-être de les reproduire) pour faciliter la communication verbale. Le traitement et la simulation des émotions par l'IA sont appelés informatique affective .
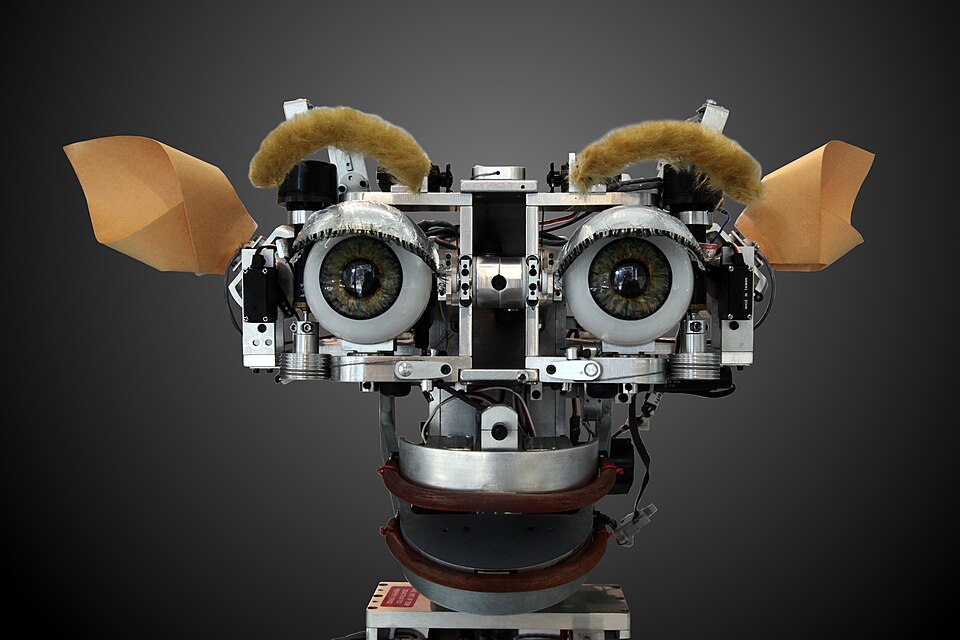
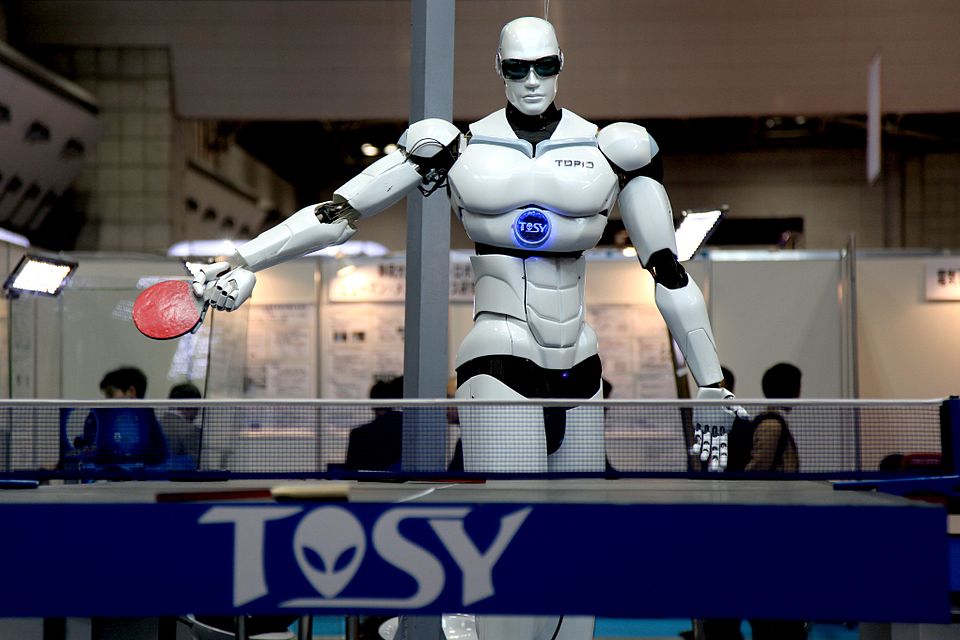
Un robot devrait pouvoir interagir de manière appropriée avec un humain en se basant sur ses expressions faciales et son langage corporel . Hanson Robotics a conçu des visages synthétiques expressifs à partir d'une peau en polymère élastique (caoutchouc) animée par des servomoteurs intégrés à un crâne métallique. Des robots comme Kismet peuvent produire une gamme d'expressions faciales, permettant ainsi des échanges sociaux significatifs. Agriculture , étroitement liée au concept d’ agriculture de précision assistée par l’IA et à l’utilisation de drones
Préoccupations liées à l'emploi

L'intégration de robots dans l'industrie a permis d'accroître l'efficacité et la productivité. Elle est généralement perçue comme un investissement à long terme pour les acteurs économiques et peut-être même comme un élément essentiel de la production. Cependant, elle risque de remplacer la majeure partie du travail effectué par les humains . Une étude de 2017 a ainsi révélé que l'automatisation à elle seule menace à terme 47 % des emplois américains. La robotique est donc souvent invoquée pour justifier la mise en place d' un revenu de base destiné à compenser les pertes de salaire. Le physicien théoricien Stephen Hawking observait en 2016 :
L'automatisation des usines a déjà décimé les emplois dans le secteur manufacturier traditionnel, et l'essor de l'intelligence artificielle risque d'étendre cette destruction d'emplois jusque dans les classes moyennes, ne laissant subsister que les rôles les plus attentionnés, créatifs ou de supervision.
En 2022, la Chine possédait le plus grand nombre de robots industriels en service, avec 1,5 million d'unités, et ce chiffre augmentait de plus de 20 % par an.
Sécurité et santé
La diffusion de la robotique présente à la fois des opportunités et des défis en matière de santé et de sécurité au travail (SST). Malgré les pertes de salaire, le remplacement des personnes travaillant dans des environnements insalubres ou dangereux constitue un avantage pour la SST. Cela concerne non seulement les emplois à haut risque dans les secteurs spatial, de la sécurité et de l'énergie, mais aussi les travaux salissants ou dangereux dans la logistique, la maintenance et l'inspection, qui exposent à des risques physiques et/ou psychosociaux, notamment ceux liés à des tâches répétitives ou monotones mieux adaptées aux machines. Les robots sont susceptibles de remplacer progressivement ces emplois dans d'autres secteurs comme l'agriculture, le nettoyage, la construction, la lutte contre les incendies, la santé et les transports.
En revanche, les humains sont mieux adaptés que les machines aux tâches légères qui requièrent différents niveaux de créativité, de prise de décision et de flexibilité. Humains et robots travaillent de plus en plus en parallèle dans leurs domaines d'expertise respectifs. La nécessité de travailler en toute sécurité dans des espaces restreints a donné naissance aux cobots (robots collaboratifs). Certains pays européens intègrent la robotique à leurs programmes nationaux, encourageant une coopération efficace entre robots et opérateurs afin d'accroître la productivité.
Carrières
La robotique est un domaine interdisciplinaire qui combine principalement le génie mécanique et l'informatique , mais qui fait également appel au génie électronique et à d'autres disciplines. Il est courant d'obtenir une licence dans l'une de ces disciplines avant d'entreprendre des études supérieures en robotique. Les ingénieurs en robotique conçoivent et entretiennent des robots, développent de nouvelles applications et mènent des recherches. En 2011, le nombre d'emplois liés à la robotique était en constante augmentation, les usines ayant de plus en plus recours aux robots. Selon un rapport GlobalData de septembre 2021 , le secteur de la robotique représentait 45 milliards de dollars américains en 2020 et devrait connaître une croissance annuelle composée de 29 % d'ici 2030, pour atteindre 568 milliards de dollars, créant ainsi des emplois dans la robotique et les secteurs connexes.
Recherche
La recherche en robotique open source vise à établir des normes pour définir et concevoir des robots, ainsi que des méthodes de construction, afin que chacun puisse les reproduire facilement. Cette recherche comprend des définitions juridiques et techniques ; la recherche d’outils et de matériaux alternatifs pour réduire les coûts et simplifier la construction ; et la création d’interfaces et de normes pour assurer la compatibilité des conceptions. La recherche sur l’ergonomie étudie également la meilleure façon de documenter les constructions par le biais d’instructions visuelles, textuelles ou vidéo.
La robotique évolutionnaire est une méthodologie qui utilise le calcul évolutionnaire pour concevoir des robots, notamment leur morphologie, leurs mouvements et leurs systèmes de contrôle comportemental . À l'instar de l'évolution naturelle , une population importante de robots est mise en compétition, ou leur capacité à accomplir une tâche est mesurée à l'aide d'une fonction d'évaluation . Les robots les moins performants sont éliminés et remplacés par un nouvel ensemble dont les comportements s'inspirent de ceux des robots les plus performants. Au fil du temps, la population s'améliore et un robot satisfaisant peut finalement apparaître sans intervention humaine directe. Les chercheurs utilisent cette méthode à la fois pour créer de meilleurs robots et pour explorer la nature de l'évolution . Ce processus nécessitant souvent l'étude de nombreuses générations de robots , cette technique peut être entièrement ou principalement mise en œuvre en simulation avant de tester les algorithmes évolués sur des robots réels .
La bionique et le biomimétisme appliquent la physiologie et les modes de locomotion des animaux à la conception des robots. Par exemple, la conception de BionicKangaroo s'inspire de la façon dont les kangourous sautent.
La robotique en essaim est une approche de la coordination de plusieurs robots au sein d'un système composé d'un grand nombre de robots physiques pour la plupart simples.
La robotique quantique est l'étude de l'exécution de programmes robotiques sur des ordinateurs quantiques , qui surpasseront probablement les ordinateurs numériques.
D'autres domaines d'étude généraux incluent les cobots, et les nanorobots . Deux conférences académiques majeures pour la recherche en robotique sont la Conférence internationale sur la robotique et l'automatisation la Conférence internationale sur les robots et systèmes intelligents .