En théorie des systèmes de commande , la méthode de la fonction descriptive (FD), développée par Nikolaï Mitrofanovitch Krylov et Nikolaï Bogoliubov dans les années 1930 et étendue par Ralph Kochenburger est une procédure d'approximation permettant d'analyser certains problèmes de commande non linéaires . Elle repose sur la quasi-linéarisation , qui consiste à approximer le système non linéaire étudié par une fonction de transfert linéaire invariante dans le temps (LTI) dépendant de l' amplitude du signal d'entrée. Par définition, la fonction de transfert d'un système LTI est linéaire et ne dépend pas de l'amplitude du signal d'entrée . Ainsi, cette dépendance à l'amplitude engendre une famille de systèmes linéaires qui sont combinés afin de tenter de reproduire les caractéristiques essentielles du comportement du système non linéaire. La fonction descriptive est l'une des rares méthodes largement applicables pour la conception de systèmes non linéaires, et elle est très largement utilisée comme outil mathématique standard pour l'analyse des cycles limites dans les contrôleurs en boucle fermée , tels que les commandes de processus industriels, les servomécanismes et les oscillateurs électroniques .
mortes ) en cascade avec un système linéaire stable et lent. La région continue dans laquelle la rétroaction est appliquée à la non-linéarité dépend de l'amplitude de la sortie du système linéaire. Lorsque l'amplitude de sortie du système linéaire décroît, la non-linéarité peut se déplacer vers une autre région continue. Ce passage d'une région continue à l'autre peut générer des oscillations périodiques . La méthode de la fonction descriptive tente de prédire les caractéristiques de ces oscillations (par exemple, leur fréquence fondamentale) en supposant que le système lent se comporte comme un filtre passe-bas ou passe-bande qui concentre toute l'énergie autour d'une seule fréquence. Même si la forme d'onde de sortie présente plusieurs modes, la méthode peut néanmoins fournir des indications sur des propriétés telles que la fréquence et éventuellement l'amplitude ; dans ce cas, la méthode de la fonction descriptive peut être vue comme décrivant le mode glissant du système à rétroaction.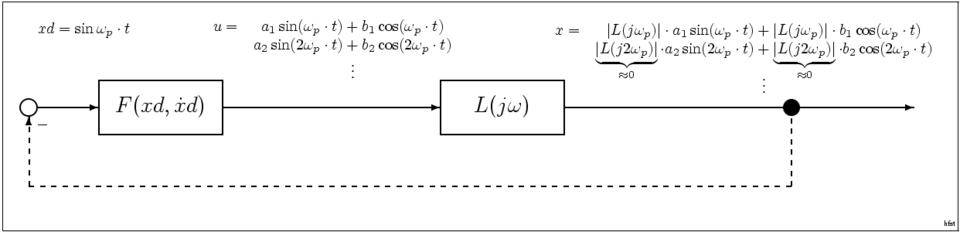
En utilisant cette hypothèse de filtrage passe-bas, la réponse du système peut être décrite par une fonction sinusoïdale . Dans ce cas, le système est caractérisé par une fonction de description d'entrée sinusoïdale (SIDF) qui décrit sa réponse à une entrée constituée d'une onde sinusoïdale d'amplitude A et de fréquence ω . Cette SIDF est une modification de la fonction de transfert utilisée pour caractériser les systèmes linéaires. Dans un système quasi-linéaire, lorsque l'entrée est une onde sinusoïdale, la sortie est également une onde sinusoïdale de même fréquence, mais d'amplitude réduite et de phase déphasée, comme indiqué par φ = φ<sub>in</sub>. De nombreux systèmes sont approximativement quasi-linéaires, en ce sens que, bien que la réponse à une onde sinusoïdale ne soit pas une sinusoïde pure, la majeure partie de l'énergie en sortie est à la même fréquence que l'entrée. Ceci est dû au fait que ces systèmes peuvent posséder des caractéristiques intrinsèques de filtrage passe-bas ou passe-bande, ce qui atténue naturellement les harmoniques, ou à l'ajout de filtres externes à cet effet. Une application importante de la technique SIDF est l'estimation de l'amplitude d'oscillation des oscillateurs électroniques sinusoïdaux .
D'autres types de fonctions descriptives ont été utilisés, notamment les fonctions descriptives pour les entrées de niveau et pour les entrées de bruit gaussien. Bien qu'elles ne fournissent pas une description complète du système, les fonctions descriptives suffisent souvent à répondre à des questions spécifiques concernant la commande et la stabilité. Les méthodes basées sur les fonctions descriptives sont particulièrement adaptées à l'analyse des systèmes présentant des non-linéarités relativement faibles. Par ailleurs, les fonctions descriptives d'entrée sinusoïdale d'ordre supérieur (HOSIDF) décrivent la réponse d'une classe de systèmes non linéaires aux harmoniques de la fréquence d'entrée d'une entrée sinusoïdale. Les HOSIDF constituent une extension des fonctions descriptives d'entrée sinusoïdale (SIDF) pour les systèmes où les non-linéarités sont significatives dans la réponse.
Mises en garde
Bien que la méthode de la fonction descriptive puisse fournir des résultats relativement précis pour une large classe de systèmes, elle peut s'avérer totalement inadaptée pour d'autres. Par exemple, elle peut échouer si le système met en évidence les harmoniques supérieures de la non-linéarité. De tels exemples ont été présentés par Tzypkin pour les systèmes tout ou rien . Un exemple assez similaire est celui d'un oscillateur en boucle fermée composé d'un trigger de Schmitt non inverseur suivi d'un intégrateur inverseur qui réinjecte sa sortie à l'entrée du trigger de Schmitt. La sortie du trigger de Schmitt est un signal carré , tandis que celle de l'intégrateur (qui le suit) est un signal triangulaire dont les pics coïncident avec les transitions du signal carré. Chacun de ces deux étages d'oscillateur est en retard de 90 degrés par rapport à son entrée. Si l'on effectuait une analyse DF sur ce circuit, l'onde triangulaire à l'entrée du trigger de Schmitt serait remplacée par sa fondamentale (onde sinusoïdale), qui, en traversant le trigger, provoquerait un déphasage inférieur à 90 degrés (car l'onde sinusoïdale le déclencherait plus tôt que l'onde triangulaire), de sorte que le système n'apparaîtrait pas osciller de la même manière (simple).
De plus, lorsque les conditions des conjectures d'Aizerman ou de Kalman sont remplies, la méthode de la fonction descriptive ne fournit pas de solutions périodiques , mais des contre-exemples avec des attracteurs périodiques cachés sont connus. Des contre-exemples à la méthode de la fonction descriptive peuvent être construits pour les systèmes dynamiques discontinus lorsqu'un segment de repos détruit les cycles limites prédits . Par conséquent, l'application de la méthode de la fonction descriptive nécessite une justification supplémentaire