Un système de contrôle gère, commande, dirige ou régule le comportement d'autres dispositifs ou systèmes au moyen de boucles de régulation . Il peut s'agir d'un simple régulateur de chauffage domestique utilisant un thermostat pour contrôler une chaudière, ou de grands systèmes de contrôle industriels servant à piloter des processus ou des machines. La conception des systèmes de contrôle repose sur une démarche d'ingénierie des systèmes de contrôle .
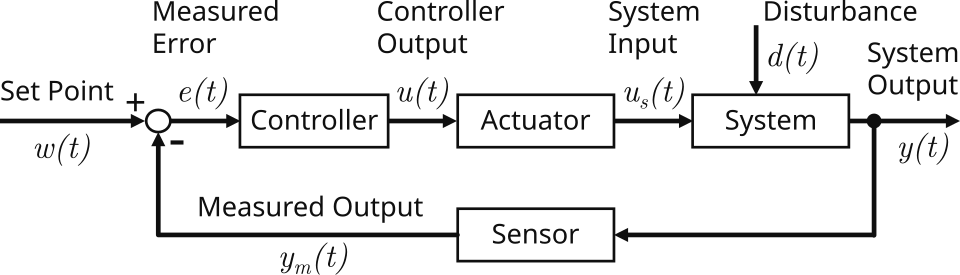
Pour la régulation à modulation continue, un régulateur à rétroaction est utilisé pour contrôler automatiquement un processus ou une opération. Le système de contrôle compare la valeur ou l'état de la variable de processus (PV) à contrôler avec la valeur souhaitée ou consigne (SP), et utilise la différence comme signal de commande pour amener la sortie de la variable de processus de l' installation à la même valeur que la consigne.
Pour la logique séquentielle et combinatoire , on utilise une logique logicielle , comme celle d'un automate programmable .le contrôle en boucle ouverte (anticipation) et le contrôle en boucle fermée (rétroaction).
- En régulation en boucle ouverte, l'action du régulateur est indépendante de la variable de fonctionnement (ou « sortie du processus »). Un bon exemple est celui d'une chaudière de chauffage central commandée uniquement par une minuterie, de sorte que la chaleur est diffusée pendant une durée constante, quelle que soit la température du bâtiment. L'action de régulation consiste à allumer ou éteindre la chaudière. Or, la variable contrôlée devrait être la température du bâtiment, ce qui n'est pas le cas car il s'agit d'une régulation en boucle ouverte de la chaudière, qui ne permet pas une régulation en boucle fermée de la température.
- En régulation en boucle fermée, l'action du régulateur dépend de la sortie du processus. Dans l'analogie de la chaudière, cela inclurait un thermostat surveillant la température du bâtiment et renvoyant un signal pour garantir que le régulateur maintienne le bâtiment à la température de consigne. Un régulateur en boucle fermée possède donc une boucle de rétroaction qui assure que l'action du régulateur permette d'obtenir une sortie du processus identique à la consigne. C'est pourquoi les régulateurs en boucle fermée sont également appelés régulateurs à rétroaction.
La définition d'un système de contrôle en boucle fermée selon la British Standards Institution est « un système de contrôle possédant une rétroaction de surveillance, le signal d'écart formé à la suite de cette rétroaction étant utilisé pour contrôler l'action d'un élément de contrôle final de manière à tendre vers la réduction de l'écart à zéro. »
De même ; « Un système de contrôle par rétroaction est un système qui tend à maintenir une relation prescrite d'une variable du système à une autre en comparant les fonctions de ces variables et en utilisant la différence comme moyen de contrôle. »
Systèmes de contrôle à rétroaction
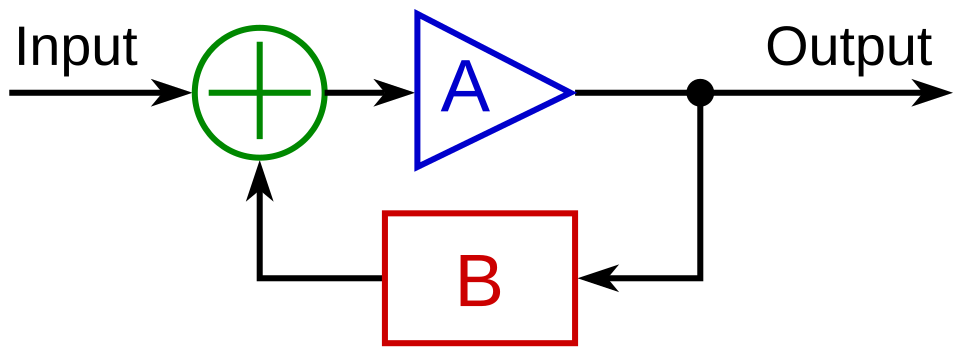
Un régulateur en boucle fermée, ou régulateur à rétroaction, est une boucle de régulation qui intègre une rétroaction , contrairement à un régulateur en boucle ouverte , ou régulateur sans rétroaction . Un régulateur en boucle fermée utilise la rétroaction pour contrôler les états ou les sorties d'un système dynamique . Son nom provient du cheminement de l'information dans le système : les entrées du processus (par exemple, la tension appliquée à un moteur électrique ) ont un effet sur les sorties du processus (par exemple, la vitesse ou le couple du moteur), lesquelles sont mesurées par des capteurs et traitées par le régulateur ; le résultat (le signal de commande) est « réinjecté » comme entrée dans le processus, bouclant ainsi la boucle.
Dans le cas des systèmes à rétroaction linéaire, une boucle de contrôle comprenant des capteurs , des algorithmes de contrôle et des actionneurs est mise en place afin de réguler une variable à une valeur de consigne . Un exemple courant est le régulateur de vitesse d'un véhicule routier : des facteurs externes, tels que le dénivelé, peuvent entraîner des variations de vitesse, et le conducteur peut modifier la vitesse de consigne. L' algorithme PID du contrôleur rétablit la vitesse réelle à la vitesse de consigne de manière optimale, avec un délai et un dépassement minimaux , en contrôlant la puissance du moteur. Les systèmes de contrôle qui intègrent une mesure des résultats à atteindre utilisent une rétroaction et peuvent s'adapter, dans une certaine mesure, aux variations des conditions. Les systèmes de contrôle en boucle ouverte, quant à eux , n'utilisent pas de rétroaction et fonctionnent uniquement selon des paramètres prédéfinis.
Les régulateurs en boucle fermée présentent les avantages suivants par rapport aux régulateurs en boucle ouverte :
- rejet des perturbations (telles que les collines dans l'exemple du régulateur de vitesse ci-dessus)
- performances garanties même en cas d'incertitudes liées au modèle , lorsque la structure du modèle ne correspond pas parfaitement au processus réel et que les paramètres du modèle ne sont pas exacts.
- Les processus instables peuvent être stabilisés.
- sensibilité réduite aux variations des paramètres
- performances améliorées du suivi de référence
- rectification améliorée des fluctuations aléatoires
Dans certains systèmes, la commande en boucle fermée et la commande en boucle ouverte sont utilisées simultanément. Dans ces systèmes, la commande en boucle ouverte, dite à anticipation , permet d'améliorer encore les performances de suivi de la consigne.
L'architecture de contrôleur en boucle fermée la plus courante est le contrôleur PID .