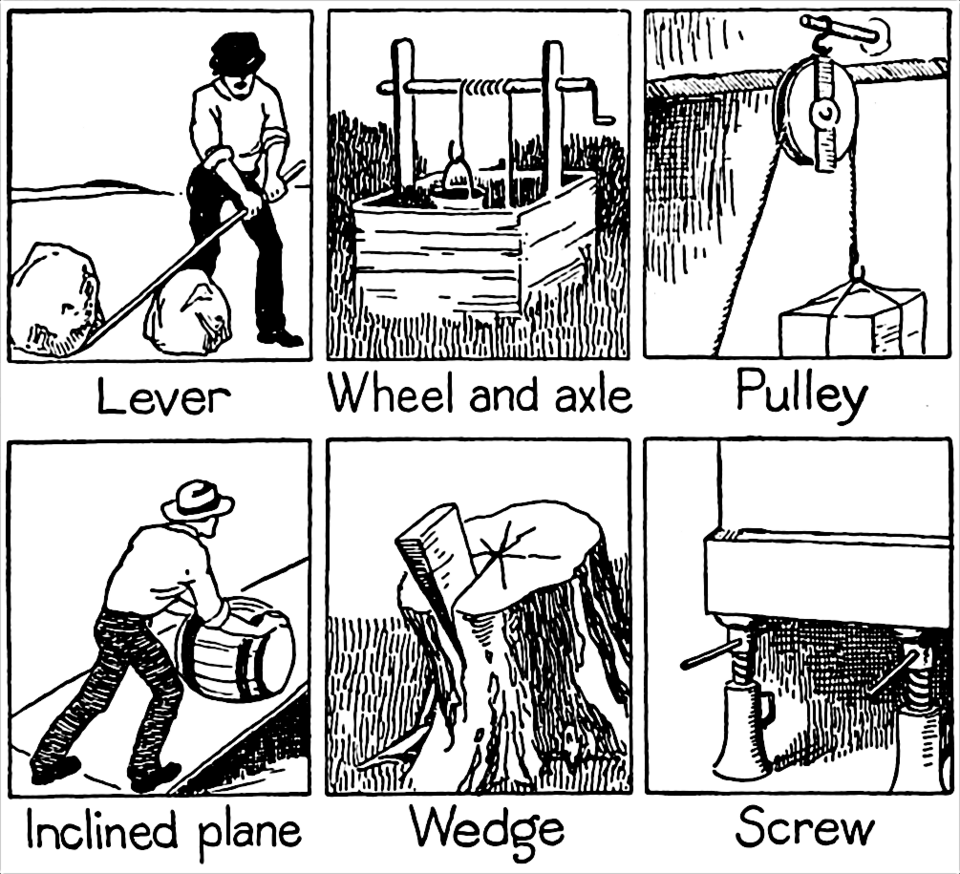
Une machine simple est un dispositif mécanique qui modifie la direction ou l'intensité d'une force . De manière générale, on peut les définir comme les mécanismes les plus simples qui utilisent l'avantage mécanique (ou levier) pour multiplier une force. Le terme désigne généralement les six machines simples classiques définies par les scientifiques de la Renaissance :
Une machine simple utilise une force appliquée unique pour effectuer un travail contre une force de charge unique. En négligeant les pertes par frottement , le travail effectué sur la charge est égal au travail effectué par la force appliquée. Une machine peut donc augmenter l'intensité de la force de sortie, au prix d'une diminution proportionnelle de la distance parcourue par la charge. Le rapport entre la force de sortie et la force appliquée est appelé avantage mécanique .
Les machines simples peuvent être considérées comme des éléments constitutifs de base dont sont composées des machines plus complexes (parfois appelées « machines composées » Par exemple, les roues, les leviers et les poulies sont tous utilisés dans le mécanisme d'une bicyclette . L'avantage mécanique d'une machine composée peut être déterminé comme le produit des avantages mécaniques des machines simples qui la constituent.
Bien qu'elles conservent une grande importance en ingénierie et en sciences appliquées, la mécanique moderne a dépassé la conception des machines simples comme éléments constitutifs ultimes de toutes les machines , une conception apparue à la Renaissance comme une amplification néoclassique des textes grecs antiques . La prolifération et la sophistication des mécanismes modernes, intensifiées durant la révolution industrielle , ne peuvent être décrites de manière adéquate par ces six catégories simplistes. Divers auteurs postérieurs à la Renaissance ont dressé des listes plus complètes de « machines simples », utilisant souvent des termes tels que machines de base , machines composées ou éléments de machine pour les distinguer des machines simples classiques mentionnées précédemment. À la fin du XIXe siècle, Franz Reuleaux avait identifié des centaines d'éléments de machine, qu'il qualifiait de machines simples . La théorie moderne des machines analyse les machines comme des chaînes cinématiques composées de liaisons élémentaires appelées paires cinématiques .
Histoire
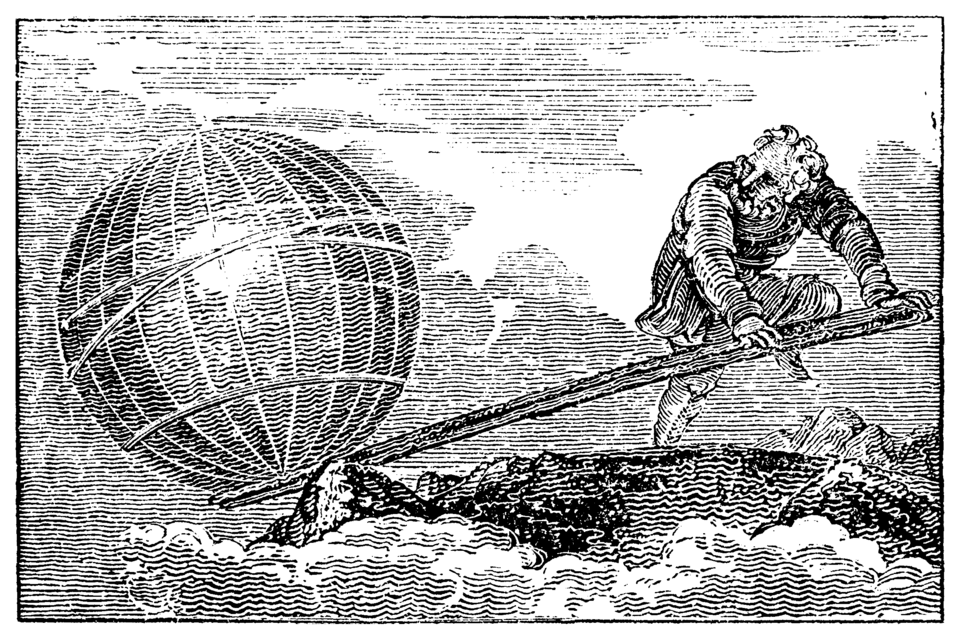
L'idée de machine simple trouve son origine chez le philosophe grec Archimède, vers le IIIe siècle avant J.-C., qui étudia les machines simples d'Archimède : le levier, la poulie et la vis . Il découvrit le principe de l'avantage mécanique dans le levier. La célèbre remarque d'Archimède à propos du levier : « Donnez-moi un appui, et je soulèverai le monde » ( en grec : δῶς μοι πᾶ στῶ καὶ τὰν γᾶν κινάσω ) exprime sa prise de conscience qu'il n'y avait pas de limite au degré d'amplification de la force pouvant être atteint grâce à l'avantage mécanique. Plus tard, des philosophes grecs définirent les cinq machines simples classiques (à l'exclusion du plan incliné ) et purent calculer leur avantage mécanique (idéal). Par exemple, Héron d'Alexandrie ( env. 10-75 ap. J.-C.) dans son ouvrage Mécanique énumère cinq mécanismes qui peuvent « mettre une charge en mouvement » : le levier , le treuil , la poulie , le coin et la vis , et décrit leur fabrication et leurs usages. Cependant, la compréhension des Grecs se limitait à la statique des machines simples (l'équilibre des forces) et n'incluait pas la dynamique , le compromis entre la force et la distance, ni le concept de travail .
Durant la Renaissance, la dynamique des forces mécaniques , nom donné aux machines simples, commença à être étudiée sous l'angle de leur capacité à soulever une charge, en plus de la force qu'elles pouvaient appliquer, menant finalement au concept de travail mécanique. En 1586, l'ingénieur flamand Simon Stevin établit l'avantage mécanique du plan incliné, qui fut intégré aux autres machines simples. La théorie dynamique complète des machines simples fut élaborée par le physicien italien Galilée en 1600 dans son ouvrage « Le Mecaniche » ( De la mécanique ), où il démontra la similitude mathématique fondamentale de ces machines en tant qu'amplificateurs de force. Il fut le premier à expliquer que les machines simples ne créent pas d'énergie , mais la transforment seulement.
Les règles classiques du frottement de glissement dans les machines ont été découvertes par Léonard de Vinci (1452-1519), mais elles n'ont jamais été publiées et ont seulement été consignées dans ses carnets. Elles étaient basées sur des conceptions scientifiques pré-newtoniennes, comme celle selon laquelle le frottement était un fluide éthéré . Elles ont été redécouvertes par Guillaume Amontons (1699) et développées plus avant par Charles-Augustin de Coulomb (1785).
machine simple idéale
Si une machine simple ne dissipe pas d'énergie par frottement, usure ou déformation, l'énergie est conservée et la machine est dite idéale. Dans ce cas, la puissance absorbée est égale à la puissance fournie, et l'avantage mécanique peut être calculé à partir de ses dimensions géométriques.
Bien que chaque machine fonctionne mécaniquement différemment, leur fonctionnement mathématique est similaire. Dans chaque machine, une force est appliquée à l'appareil en un point, et celui-ci effectue un travail en déplaçant une charge en un autre point. Si certaines machines ne font que modifier la direction de la force, comme une poulie fixe, la plupart multiplient l'intensité de la force par un facteur, l' avantage mécanique.
qui peut être calculée à partir de la géométrie de la machine et du frottement.
Les machines simples ne possèdent pas de source d' énergie [ elles ne peuvent donc pas effectuer un travail supérieur à celui qu'elles reçoivent de la force d'entrée . Une machine simple sans frottement ni élasticité est appelée machine idéale En raison de la conservation de l'énergie , dans une machine simple idéale, la puissance de sortie (taux de rendement énergétique) est à tout instant égale à la puissance d'entrée.
La puissance de sortie est égale à la vitesse de la charge multipliée par la force appliquée . De même, la puissance absorbée par la force appliquée est égale à la vitesse du point d'entrée multipliée par la force appliquée . Par conséquent,
L'avantage mécanique d'une machine idéale est donc égal au rapport des vitesses , c'est-à-dire le rapport entre la vitesse d'entrée et la vitesse de sortie.
Le rapport de vitesse est également égal au rapport des distances parcourues dans une période de temps donnée
Par conséquent, l'avantage mécanique d'une machine idéale est également égal au rapport de distance , c'est-à-dire le rapport entre la distance parcourue en entrée et la distance parcourue en sortie.
Cela peut se calculer à partir de la géométrie de la machine. Par exemple, le rapport de l'avantage mécanique et de la distance du levier est égal au rapport de ses bras de levier .
L'avantage mécanique peut être supérieur ou inférieur à un :
- Si la force de sortie est supérieure à la force d'entrée, la machine agit comme un amplificateur de force, mais la distance parcourue par la charge est inférieure à la distance parcourue par la force d'entrée .
1\,
- Si la force de sortie est inférieure à la force d'entrée, mais que la distance parcourue par la charge est supérieure à la distance parcourue par la force d'entrée.
Dans la vis , qui utilise un mouvement de rotation, la force d'entrée doit être remplacée par le couple et la vitesse par la vitesse angulaire de rotation de l'arbre.
Friction et efficacité
Toutes les machines réelles subissent des frottements, ce qui entraîne la dissipation d'une partie de la puissance absorbée sous forme de chaleur. Si la puissance perdue par frottement est égale à la puissance absorbée, d'après le principe de conservation de l'énergie, cette perte est égale à la puissance absorbée.
Le rendement mécanique d'une machine (où ) est défini comme le rapport entre la puissance de sortie et la puissance d'entrée, et représente une mesure des pertes d'énergie par frottement.
Comme indiqué ci-dessus, la puissance est égale au produit de la force et de la vitesse, donc
Donc,
Dans les machines non idéales, l'avantage mécanique est toujours inférieur au rapport des vitesses par le produit du rendement . Ainsi, une machine soumise au frottement ne pourra pas déplacer une charge aussi importante qu'une machine idéale équivalente, à force d'entrée égale.
Machines composées
Une machine composée est une machine formée d'un ensemble de machines simples connectées en série, la force de sortie de l'une fournissant la force d'entrée à la suivante. Par exemple, un étau d'établi est constitué d'un levier (la poignée de l'étau) en série avec une vis, et un train d'engrenages simple est constitué d'un certain nombre d' engrenages ( roues et essieux ) connectés en série.
L'avantage mécanique d'une machine composée est le rapport entre la force de sortie exercée par la dernière machine de la série et la force d'entrée appliquée à la première machine, c'est-à-dire :
Étant donné que la force de sortie de chaque machine est l'entrée de la suivante, cet avantage mécanique est également donné par
Ainsi, l'avantage mécanique de la machine composée est égal au produit des avantages mécaniques de la série de machines simples qui la constituent.
De même, le rendement d'une machine composée est également le produit des rendements de la série de machines simples qui la constituent.
Machines à verrouillage automatique
Dans de nombreuses machines simples, si la force de charge est suffisamment élevée par rapport à la force d'entrée , la machine se déplacera en sens inverse, la force de charge effectuant un travail sur la force d'entrée. Ces machines peuvent donc fonctionner dans les deux sens, la force motrice étant appliquée à n'importe quel point d'entrée. Par exemple, si la force de charge sur un levier est suffisamment élevée, le levier se déplacera en sens inverse, déplaçant le bras d'entrée vers l'arrière à l'encontre de la force d'entrée. On les appelle machines réversibles , non verrouillables ou à retour automatique , et le mouvement de retour automatique est appelé retour automatique .
Cependant, dans certaines machines, si les forces de frottement sont suffisamment élevées, aucune force de charge ne peut les faire reculer, même si la force d'entrée est nulle. On parle alors de machine autobloquante , irréversible ou non révisable . Ces machines ne peuvent être mises en mouvement que par une force appliquée à l'entrée et, lorsque cette force est supprimée, elles restent immobiles, « bloquées » par le frottement dans la position où elles se trouvaient.
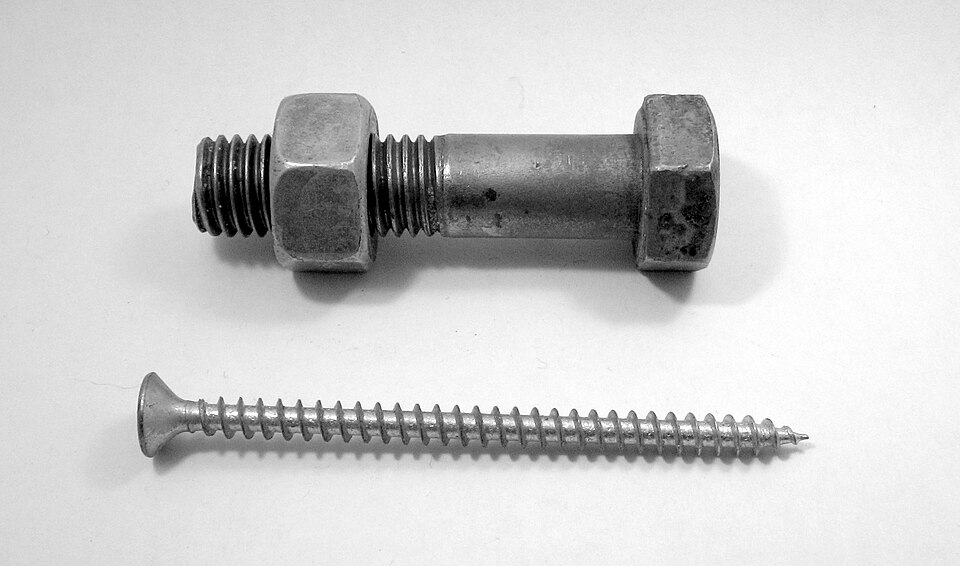
L'autoblocage se produit principalement dans les machines présentant de grandes surfaces de contact glissant entre les pièces mobiles : la vis , le plan incliné et le coin :
- L'exemple le plus courant est celui d'une vis. Dans la plupart des vis, on peut déplacer la vis vers l'avant ou vers l'arrière en la tournant, et on peut déplacer l'écrou le long de la tige en le tournant, mais aucune pression exercée sur la vis ou l'écrou ne permettra de les faire tourner.
- Sur un plan incliné, une charge peut être tirée vers le haut par une force d'entrée latérale, mais si le plan n'est pas trop incliné et qu'il y a suffisamment de frottement entre la charge et le plan, lorsque la force d'entrée est supprimée, la charge restera immobile et ne glissera pas vers le bas du plan, quel que soit son poids.
- On peut enfoncer un coin dans un bloc de bois en exerçant une force sur son extrémité, par exemple en le frappant avec une masse, ce qui écarte les côtés, mais aucune force de compression exercée par les parois du bois ne le fera ressortir du bloc.
Une machine sera autobloquante si et seulement si son rendement est inférieur à 50 % :
Le verrouillage automatique d'une machine dépend à la fois des forces de frottement ( coefficient de frottement statique ) entre ses pièces et du rapport des distances (avantage mécanique idéal). Si le frottement et l'avantage mécanique idéal sont suffisamment élevés, la machine se verrouillera automatiquement.
Preuve
Lorsqu'une machine se déplace vers l'avant du point 1 au point 2, la force d'entrée effectuant un travail sur la force de charge, le principe de conservation de l'énergie implique que le travail fourni est égal à la somme du travail effectué sur la force de charge et du travail perdu par frottement.
| Éq. 1 |
Si l'efficacité est inférieure à 50 % ( ) :
D'après l'équation 1
Lorsque la machine se déplace en sens inverse du point 2 au point 1, la force de charge effectuant un travail sur la force d'entrée, le travail perdu par frottement est le même.
Le travail de production est donc
La machine se bloque donc automatiquement, car le travail dissipé par le frottement est supérieur au travail effectué par la force de charge qui la fait reculer, même sans force d'entrée.
théorie des machines modernes
Les machines sont étudiées comme des systèmes mécaniques composés d' actionneurs et de mécanismes qui transmettent des forces et des mouvements, contrôlés par des capteurs et des contrôleurs. Les composants des actionneurs et des mécanismes sont constitués de liaisons et d'articulations formant des chaînes cinématiques.
Chaînes cinématiques

Les machines simples sont des exemples élémentaires de chaînes cinématiques utilisées pour modéliser des systèmes mécaniques allant de la machine à vapeur aux manipulateurs robotisés. Les paliers qui constituent le point d'appui d'un levier et permettent la rotation de la roue, de l'essieu et des poulies sont des exemples de couple cinématique appelé articulation. De même, la surface plane d'un plan incliné et le coin sont des exemples de couple cinématique appelé articulation glissante. La vis est généralement considérée comme un couple cinématique à part entière, appelé articulation hélicoïdale.
Deux leviers, ou manivelles, sont combinés en un mécanisme plan à quatre barres en fixant une biellette qui relie la sortie d'une manivelle à l'entrée de l'autre. Des biellettes supplémentaires peuvent être fixées pour former un mécanisme à six barres ou en série pour former un robot.
Classification des machines
L'identification des machines simples découle du désir de disposer d'une méthode systématique pour inventer de nouvelles machines. Par conséquent, il est essentiel de comprendre comment combiner des machines simples pour former des machines plus complexes. Une approche consiste à assembler des machines simples en série pour obtenir des machines composées.
Cependant, une stratégie plus efficace a été mise au point par Franz Reuleaux , qui a collecté et étudié plus de 800 machines élémentaires. Il s'est rendu compte qu'un levier, une poulie et une roue et un essieu constituent en réalité le même dispositif : un corps tournant autour d'une charnière. De même, un plan incliné, un coin et une vis sont un bloc glissant sur une surface plane.
Cette observation montre que ce sont les articulations, ou les liaisons qui permettent le mouvement, qui constituent les éléments principaux d'une machine. En partant de quatre types d'articulations – l' articulation rotative , l' articulation coulissante , l'articulation à came et l'articulation à engrenages – et des liaisons associées telles que les câbles et les courroies, il est possible de concevoir une machine comme un assemblage de pièces solides reliant ces articulations.
Synthèse cinématique
La conception de mécanismes permettant d'effectuer les mouvements et la transmission de force requis est appelée synthèse cinématique . Il s'agit d'un ensemble de techniques géométriques pour la conception mécanique de liaisons , de mécanismes à came et suiveur, ainsi que d'engrenages et de trains d'engrenages .